Космическая, железнодорожная и другая специальная техника в Техническом музее, г.Тольятти
Навигация по странице:
Паровоз ТЭ-4844
Паровоз Эр 170665
Паровоз ЕА 2441
Паровоз Л-0549
Вагоны боевого железнодорожного ракетного комплекса 15П961 "Молодец" с МБР 15Ж61 (РТ-23 УТТХ)
АСВП типа «Барс»
Протип робота СТР-1
Космическая техника
Шасси лунохода
Марсоход "Марс-94" ("Мир")
Подвижный аппарат для исследования поверхности Фобоса
Макет шагающего аппарата
Платформа с гусеничным движителем
Платформа с колесно-шагающим движителем
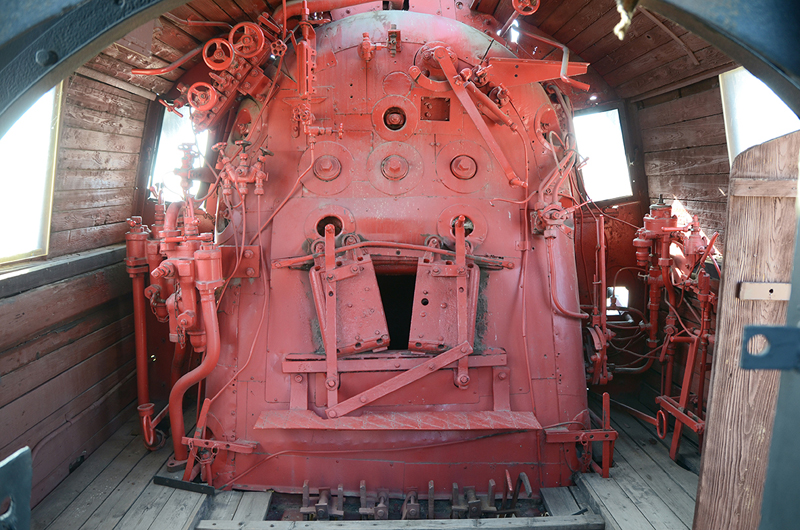
Паровоз ТЭ-4844
На снимке - трофейный немецкий "кригслокомотив", получивший в СССР обозначение ТЭ. Судя по тому, что немецкие инвентарные номера оставались неизмененными, выставленный в Тольятти ТЭ-4844 произведен Берлинским заводом.
Паровоз военного времени был создан в Германии на базе серии 50 «мирного выпуска» путем максимального удешевления и упрощения конструкции. Предполагалось что их срок эксплуатации будет не более пяти лет. Тем не менее, машины создававшиеся с прицелом на короткую военную жизнь, прослужили до 1970-ых годов.
Всех заинтересовавшихся отсылаю к поиску в сети - статья Васильев Паровозы «ФРАУ» (Локотранс №2 за 1995 год) раскрывает тему достаточно полно.


Паровоз Эр 170665
Летом 1933 года НИИ реконструкции тяги разработал проект удлинения топки паровоза Эм. Мощность паровоза по котлу и сцепному весу благодаря увеличению огневой коробки возросла. Паровозам с удлиненной топкой присвоили серию Эр—«реконструированный».
На снимке - паровоз серии Эр произведенный в Венгрии по советскому проекту. С 1947 года такое производство велось на заводе MAVAG, сначала в качестве репараций, а потом — по заказу (объем выпуска 1345 штук). Поэтому почти половина всех паровозов Эр послевоенной постройки — венгерского производства. Разрушенные отечественные заводы не могли обеспечить в короткий срок эту потребность, поставка паровозов серии Е с началом холодной войны была прекращена, поэтому было принято решение заказать в Румынии, Польше, Венгрии и Чехословакии большую партию паровозов. Кроме невысокой нагрузки на ось, эти локомотивы должны были обладать важными свойствами — быть простыми в изготовлении, чтобы успешно производиться на заводах, тоже ослабленных войной, и быть традиционной для нас конструкции, чтобы успешно работать в СССР.
С другой стороны, хорошо запомнив уроки войны, правительство опять создавало новые резервы паровозов, новые колонны. Для них требовались предельно простые паровозы средней мощности и небольшого веса. Никакой паровоз, кроме серии Э, не отвечал всем этим требованиям.
Подробнее с историей локомотивов Эр можно ознакомиться здесь: Паровозы класса Э.












Паровоз ЕА 2441
Паровоз ЕА 2441 относится серии грузовых паровозов типа 1-5-0, поставлявшихся на железные дороги Российской империи и Советского Союза во время Первой и Второй мировых войн для быстрого пополнения паровозного парка. Строились на североамериканских заводах, но по чертежам, разработанным русскими инженерами; с 1917 года поставлялись как военная помощь, а с 1943 года — по ленд-лизу. Помимо этого, по различным мотивам, в том числе и политическим, данные паровозы эксплуатировались в США («Russian Decapod»), Финляндии (Tr2 «Truman») и Китайской Республике (ST-1). Наиболее известная разновидность — ЕА, на долю которой пришлось около трети всех паровозов серии.
Более подробно историю серии Еа можно посмотреть на той же Википедии.




Паровоз Л-0549
Локомотивы серии Л - одни из лучших советских паровозов. Начало производства: победный, 1945 год. Отсюда первоначальное название серии - "П", которое в 1947 году сменили на "Л", в честь конструктора Лебедянского. Они послужил основой для паровоза ОР18 (позже был переименован в ЛВ), который был самым экономичным советским паровозом (КПД = 9,3 %).




Вагоны боевого железнодорожного ракетного комплекса 15П961 "Молодец" с МБР 15Ж61 (РТ-23 УТТХ)
БЖРК выглядит как обычный состав из рефрижераторных и пассажирских вагонов. Три из этих "рефрижераторных" вагона несут по ракете РТ-23 в транспортно-пусковом контейнере. Отличительный признак вагонов - пусковых установок: восемь колесных пар. Остальные вагоны - агрегаты обеспечения, которые имеют по четыре колесные пары. Стандартная конфигурация БЖРК 15П961 "Молодец" была такова:
- три тепловоза ДМ-62;
- три трехвагонных пусковых модуля 15П761, каждый из которых может осуществлять пуск, как в составе поезда, так и автономно;
- командный модуль 15В201А в составе 7 вагонов.
Техническая позиция БЖРК (15П352) обычно находилась в пунктах постоянной дислокации (могу ошибаться - требуется уточнение).

Вагоны БЖРК: командный пункт пускового модуля 15В199А и пусковая установка 15Т272А

Пусковая установка 15Т272А из состава автономного пускового модуля 15П761

Командный пункт автономного пускового модуля - агрегат 15В199А
Вагон – пусковая установка 15Т272А (из состава автономного пускового модуля 15П761) разработан в КБ специального машиностроения под руководством главного конструктора А.Уткина. На фотографиях видны его характерные признаки: восемь колесных пар и открывающаяся крыша (с гидравлическим приводом и устройством для закорачивания и отвода контактной сети). Пуск ракет может осуществляться с любой точки маршрута. Для этого состав останавливается, специальным устройством отводится в сторону контактная подвеска.Транспортно-пусковой контейнер поднимается в вертикальное положение пневматическим приводом с помощью ПАД’а. После чего осуществляется минометный старт ракеты. Уже в воздухе ракета заклоняется с помощью порохового ускорителя и только после этого запускается маршевый двигатель. Заклонение ракеты позволило отвести струю маршевого двигателя от пускового комплекса и обеспечить его устойчивость.
Вагоны БЖРК поступили в музей в разукомплектованном состоянии, поэтому установить, где именно они эксплуатировались, пока не представляется возможным. Соответственно, у музея нет возможности и показать интереснейшие устройства: подъемник ТПК, отвод контактной сети, устройство передачи нагрузки при запуске ракеты на соседние вагоны.
Единственный, относительно комплектный, автономный боевой модуль 15П761 в штатном составе (три вагона: агрегат 15Т271А - командный пункт; агрегат 15Т272А - пусковая установка; агрегат 15Т273А - вагон технологического оборудования энергопитания и термостатирования) выставлен в Музее натурной железнодорожной техники им В.В.Чубарова (Варшавский вокзал, г.Санкт-Петербург). Там же представлен модифицированный тепловоз М62 (3 единицы на каждый БЖРК).
К сожалению, командный модуль 15В201А (в составе 7 вагонов), входивший в состав БЖРК, и техническая позиция 15П352 (6 единиц техники) не сохранились.
По косвенным сведениям, выставленные в Тольяттинском музее вагоны, построены на Калининском заводе в 1986 году и ранее входили в состав Костромского БЖРК.
Тем, кто хочет поглубже погрузиться в тему, не ограничиваясь Википедией, предлагаю обратиться к двум ссылкам:
1. Лучшим источником информации по БЖРК для меня стала тема: 15П961 Молодец Боевой железнодорожный ракетный комплекс (БЖРК) на портале Российская военная техника
2. Схемы и некоторые технические параметры вагонов, входивших в состав БЖРК, доступны ссылке: Боевой железнодорожный ракетный комплекс. Кстати, большинство фотографий, которые размещены на этом сайте - из инспекторских альбомов времён подписания договора СНВ-2.
АСВП типа «Барс»




Протип робота СТР-1
"Весной 1986 г. произошла авария четвертого энергоблока Черно-быльской атомной электростанции. Как установила позже комиссия по расследованию причин аварии, она была связана с недопустимо высоким перегревом воды и газов в замкнутых объемах технологических систем реактора и не носила характера ядерного взрыва. Однако взрыв вскрыл реактор, разметал радиоактивное "горючее” — так называемые тепловыделяющие элементы (ТВЭЛы), а также графитовую кладку, трубы тепловых каналов и другие элементы энергетических и строительных конструкций, имевших различные дозы радиоактивного излучения. Район с расстоянием в диаметре примерно 30 км был объявлен опасной зоной. Отсюда было эвакуировано население и были развернуты дезактивационные работы.
Наибольший объем первоочередных работ предстояло сделать на самой станции и ее территории, где уровень излучения был особенно высок. Главными задачами здесь являлись изоляция остатков аварийного реактора от природной среды и сохранившихся сооружений, а также расчистка завалов, образованных взрывом на кровлях и территории станции, и захоронение радиоактивной массы. Проведение этих работ потребовало применения различного рода дистанционно управляемых технических средств, которые должны были уменьшить количество людей, привлекаемых для восстановительных работ в опасных зонах, снизить их суммарные бэрозатраты.
К числу подобных средств относятся и специализированные транспортные роботы ССТР-1), являющиеся главной составной частью робототехнического комплекса, предназначенного для расчистки завалов, удаления продуктов аварийного выброса и загрязненных материалов в радиоактивных зонах, недоступных для длительной работы людей, в частности, на кровлях зданий и сооружений станции".
А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др., «Планетоходы»

Разработанный коллективом инженеров ВНИИ "ТрансМаш" под руководством Александра Кемурджиана робот СТР-1 (прототип). Робототехнический комплекс использовался при ликвидации аварии на Чернобыльской АЭС

Специализированный робот СТР-1 представляет собой транспортное средство высокой проходимости с дистанционным управлением по радиокомандам при обзоре местности водителем с помощью бортовых и стационарных телесистем

Обзорная телекамера типа КТП с приводами по углам азимута и возвышения. Две курсовые неподвижные телекамеры типа КТЦ закреплены в герметичном металлическом боксе на верхней части П-образной стойки. Визуализация окружающего пространства осуществлялась с помощью телевизионных камер установленных, как на самом роботе, так и на мачтах установленных в месте выполнения работ (на кровле ЧАЭС, возле ВТ-2 и т.д.)

Рабочий орган СТР-1 – бульдозерный отвал с механизмом подъема-опускания. Бульдозерный отвал находится в поле зрения передней курсовой камеры.
"Технические решения, заложенные в конструкцию самоходного шасси, выбирались исходя из концепции высокопроходимого авто-номного транспортного средства, устойчивого к воздействию радиационного излучения, осадков, транспортных перегрузок и периодической дезактивации механическим путем, водой и химическими растворами.
Автономность самоходного шасси обеспечивается применением бортового источника питания в виде двух серебряно-цинковых батарей. Наряду с использованием для управления командной радиолинии это позволяло существенно упростить развертывание комплекса на кровле. Отсутствие кабельной связи СТР-1 со стационарным оборудованием (для энергопитания и управления в рабочем режиме эксплуатации) обеспечивало наиболее высокую маневренность аппарата и являлось одним из главных отличий от большинства других отечественных и зарубежных транспортных роботов, применявшихся на кровлях ЧАЭС.
Время автономной работы самоходного шасси ограничивается зарядом тяговой батареи. Для подзарядки батарей на месте работ самоходное шасси было снабжено бортовым стыковочно-зарядным узлом, обеспечивающим соединение цепей источника и стационарного зарядно-разрядного устройства без непосредственного участия человека.
Высокая проходимость самоходного шасси достигалась благодаря использованию индивидуальных электромеханических приводов, индивидуальных независимых подвесок колес, выполнению колес в виде жестких металлических оболочек с грунтозацепами на беговой дорожке. Шасси имело достаточные дорожный просвет (клиренс) и ход рычагов подвески.
Радиационная стойкость обеспечивалась тщательным выбором материалов и комплектующих. Параллельно решалась и задача обеспечения возможности дезактивации. В частности, схемы электрических блоков шасси собраны на реле и контакторах, все неподвижные и подвижные соединения герметизированы, в тяговых приводах использована радиационно стойкая смазка, в кабельной сети использованы радиационно стойкие провода. Основные конструкционные матералы — титановые и легированные сплавы. Сварные полые колеса герметичны. Наружные поверхности узлов самоходного шасси имеют простые формы, без труднодоступных объемов. Они покрыты радиационно стойкой краской, сохраняющей свои свойства после действия воды, кислотных и щелочных растворов. Цвет покрытия — белый для облегчения работы оператора по телевизионному изображению на кровлях, имеющих темный фон".
А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др., «Планетоходы»

В период с 8 августа по 10 октября 1986 два транспортных робота СТР-1 отработали на кровлях ЧАЭС более 200 часов, расчистив завалы и удалив более 90 тонн радиоактивных материалов
Космическая техника
С черным покрытием - спускаемый аппарат космического корабля «Союз» (отсутствует теплозащитный щит, прикрывавший дно аппарата, двигатели мягкой посадки и высотомер).
Серебристого цвета - возвращаемый отсек спутника фоторазведки «Янтарь-2К».
Дополнительно:
«Янтарь-4К1» в Музейно-выставочном центре «Самара Космическая»
«Янтарь-2К». Военно-патриотический парк «Патриот»


Согласитесь, что в столь щекотливом деле, как разведка, особый интерес представляет точка зрения оппонента. 10 августа 2020 года портал The Space Review опубликовал интересную статью Bart Hendrickx, "Upgrading Russia’s fleet of optical reconnaissance satellites". Её перевод на русский язык опубликован в БЛОГе bmpd, выходящим под эгидой Центра анализа стратегий и технологий. Цитата:
"Большинство разведывательных спутников, летавших в советское время, возвращали пленку на Землю в капсулах. Спутники этого типа продолжали использоваться после распада Советского Союза, последний из которых был запущен в 2015 году. Они назывались «Зенит» (девять типов, более 600 запусков в период с 1961 по 1994 год), «Янтарь» (пять типов, почти 180 запусков с 1974 по 2015 год) и «Орлец» (два типа, 10 запусков с 1989 по 2006 год). Все эти спутники были спроектированы и построены Центральным специализированным конструкторским бюро (ЦСКБ) и его дочерним заводом "Прогресс" в Куйбышеве (переименованным в Самару в 1991 году). Оно было основано в 1958 году как филиал ОКБ-1 Сергея Королева, а в 1974 году стало самостоятельным.
Недостатками спутников с системой возврата пленки были ограниченный запас пленки, которую они могли нести (и, следовательно, их ограниченный срок службы), и, что более важно, их неспособность своевременно передавать изображения. В 1976 году Соединенные Штаты вывели на орбиту свой первый цифровой разведывательный спутник KH-11 / KENNEN, используя электронно-оптическую технологию для передачи изображений на Землю в реальном масштабе времени. Было запущено 16 спутников этого типа, четыре из которых в настоящее время находятся на орбите. Предполагается, что они несут телескоп с главным зеркалом диаметром 2,4 метра, их сравнивают с космическим телескопом Hubble, но смотрящими на Землю, а не на Вселенную, и имеют теоретическое разрешение на местности 0,15 метра. Спутники отправляют изображения на Землю через спутники ретрансляции данных, находящиеся на высокоэллиптических и геостационарных орбитах.
Советский Союз запустил свой первый оптико-электронный разведывательный спутник только в декабре 1982 года. Аппарат использовал платформу пленочных спутников «Янтарь» и традиционную оптическую камеру, не способную соответствовать разрешающей способности зеркального телескопа KENNEN. Кроме того, на нем была инфракрасная камера для ночных наблюдений. Спутники первого поколения («Янтарь-4КС1», или «Терилен») с расчетным разрешением 1 метр с высоты 200 километров в период с 1982 по 1989 год запускались девять раз. Усовершенствованный спутник второго поколения («Янтарь-4КС1М», или «Неман») имел разрешение менее метра, в период с 1986 по 2000 год было выполнено 15 запусков. Продолжительность полета постепенно увеличивалась с шести месяцев до более года, но даже это было намного короче, чем многолетние миссии, выполняемые американскими спутниками цифровой разведки.
Только в 1983 году советское правительство санкционировало разработку спутника, который по своим характеристикам был близок к KENNEN. Для этого Ленинградскому оптико-механическому заводу (ЛОМО) было предписано построить оптическую систему 17В317 с телескопом с диаметром зеркала 1,5 метра. Он должен был летать на двух разных типах спутников. Один, называвшийся «Сапфир», должен был быть построен ЦСКБ-Прогресс и выводиться на низкие орбиты для задач "ближней" целевой разведки, а другой, получивший название «Аракс» (также известный как «Аркон»), должен был быть произведен НПО им. Лавочкина и летать на гораздо более высоких орбитах для задач разведки обширных районов. В конечном итоге «Сапфир» так и не был запущен, а два спутника «Аракс», которые НПО им. Лавочкина удалось запустить в 1997 и 2002 годах, вышли из строя задолго до истечения расчетного срока службы."
Ходовой макет лунохода с имитацией моментов инерции масс
Разработанный в 1978 года коллективом инженеров ВНИИ "ТрансМаш" под руководством Александра Кемурджиана, макет лунохода. Перед нами шасси со специальным устройством для уменьшения веса, позволявшим создать мнимый эффект невесомости на земле (за подсказку спасибо сотруднику Технического музея Людмиле Сапаловой).
Как известно, сила тяжести на Луне в шесть раз меньше земной. Поэтому перед конструкторами лунохода стояла задача: имитировать необычные условия. С помощью системы кранов и резиновых жгутов создали первую, которая сегодня кажется примитивной, установку, с помощью которой можно было как бы «обезвесить» машину и получить данные о ее движении. Таким образом, в земных условиях, стало возможно исследовать проходимость и угловые колебания лунохода, путем имитации его натурного веса за счет уменьшения массы и имитации натурных моментов инерции.



"В процессе разработки шасси «Лунохода-1» важной проблемой являлось проведение ходовых испытаний шасси в земных условиях с целью отработки конструкции и исследования проходимости. Для получения достоверной информации о движении «Лунохода-1» наземные испытания шасси проводились в условиях, обеспечивающих имитацию тягово-сцепных характеристик и динамического характера взаимодействия шасси с лунной поверхностью. С этой целью движение шасси осуществлялось в условиях имитируемой лунной гравитации на поверхности, являющейся инженерной моделью различных участков поверхности Луны.
...
Для моделирования рельефа лунной поверхности использовалась информация о статистическом распределении кратеров, лунок, отдельных камней, гряд, россыпей камней и т. п., полученная с помощью автоматических аппаратов и относящаяся к различным участкам Луны.
При имитации силовых нагрузок на электроприводы мотор-колес шасси учитывалось влияние высокого вакуума и температур, господствующих па Луне, на потери в редукторах и уплотнениях, а также на тяговые и скоростные характеристики приводных электродвигателей. Информация о влиянии вакуума и значительного перепада температур на работу узлов ходовой части была получена в результате испытаний отдельных узлов в термобарокамере и в условиях от-крытого космоса на искусственных спутниках Земли и Луны.
Имитация лунной гравитации, составляющей 1/6 земной, достигалась двумя методами. Наиболее распространенным ввиду технической простоты, хотя и не полностью строгим, является метод испытаний шасси на макетах, вес которых равен весу «Лунохода-1» на Луне («весовые» макеты). Для повышения точности результатов специальная конструкция «весовых» макетов обеспечивала имитацию положения центра тяжести и моментов инерции лунохода.
Другим методом ходовых испытаний шасси в условиях имитируемой лунной силы тяжести являлись испытания шасси на макете, масса и соотношение подрессоренных и неподрессоренных частей которого соответствовали «Луноходу-1» («массовые» макеты).
Испытания шасси на «массовых» макетах проводились на имитаторе пониженной гравитации, обеспечивающем вывешивание (разгрузку) веса макета. Разгрузка макета осуществлялась с помощью системы с резиновыми жгутами. При движении макета по грунтовому каналу имитатор перемещался с помощью автоматической следящей системы таким образом, чтобы жгуты (а следовательно, и разгружающие усилия) сохранялись в строго вертикальном положении. Применение имитатора пониженной гравитации накладывает определенные ограничения на движение макетов. Поэтому имитатор использовался в основном для проверки устойчивости и динамики движения лунохода через отдельные препятствия.
...
Эти два метода воспроизведения лунной гравитации позволили количественно оценить характер взаимодействия движителя шасси с грунтом с учетом изменения его механических характеристик за счет изменения ускорения силы тяжести".
А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др., «Планетоходы»
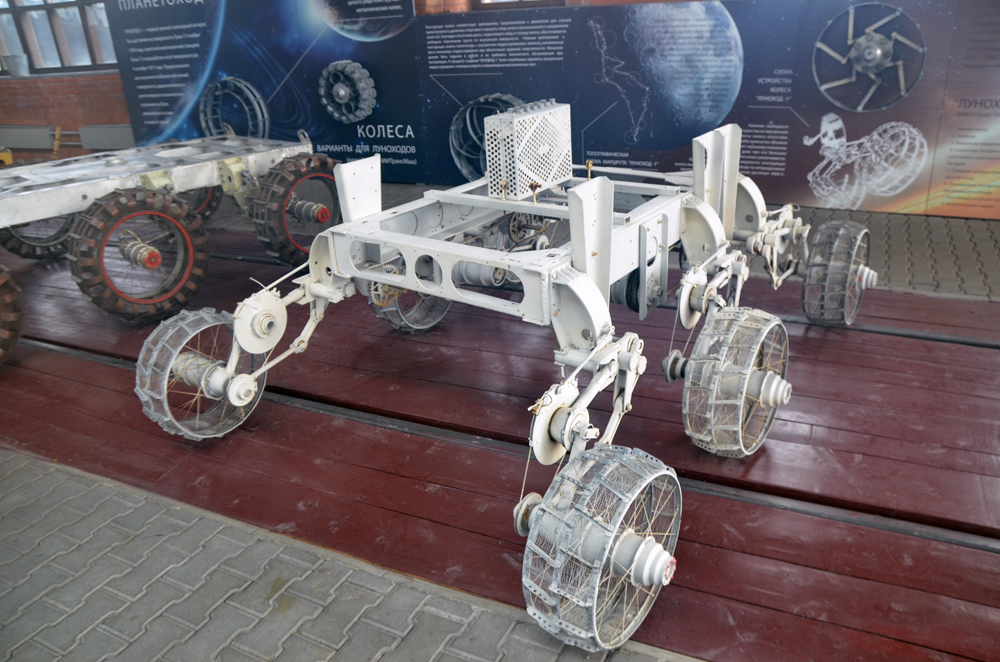
Шасси лунохода
Разработанное в 1978 году ВНИИ "ТрансМаш" изделие предназначалось для проведения опытно-конструкторских работ в рамках проекта по созданию шасси лунохода для передвижения космонавтов. Платформа прошла всесторонние испытания по сложному рельефу местности со слабосвязанными грунтами на склонах вулканов Камчатки.



"На планетоходах, доставленных на Луну, предпочтение было отдано колесному движителю. И хотя выбор того или иного варианта движителя во многом зависит от субъективных взглядов автора разработок, все же можно считать, что колесные движители для планетоходов предпочтительнее. Опорно-тяговая проходимость колесных планетоходов за счет некоторого усложнения конструкции может быть приближена к проходимости гусеничных. Однако и гусеничный движитель постоянно совершенствуется. Известен ряд конструкций, нивелирующих преимущества того или иного варианта движителя.
Рассматривая недостатки и достоинства схем движителей с различным числом функциональных элементов, таких как отдельное колесо или гусеница, следует помнить, что изменение числа колес или гусениц не приводит к качественным изменениям основных показателей планетоходов. Исключением могли бы быть многосекционные планетоходы — поезда, позволяющие поднять на качественно новый уровень проходимость машины. Однако их использование связано с необходимостью решения серии технических задач по доставке и стыковке секций, управлению движением и других, не менее сложных, что в настоящее время не позволяет говорить о подобных конструкциях.
...
Колесный движитель, выполненный по формуле 4x4, как и двухгусеничная схема, характеризуется предельной простотой конструкции. Недостатки схемы: низкая профильная проходимость (по ширине рва, высоте выступов, наличию ограничений, характеризуемых радиусом продольной проходимости); необходимость установки колес большого диаметра для обеспечения опорной проходимости; наличие значительного реактивного момента, обусловленного большим диаметром колес и приводящего к значительному перераспределению нормальных нагрузок по колесам; большая теплонапряжённость тяговых электродвигателей и тормозов; худшая поворот-ливость при использовании бортовой схемы поворота; увеличение габаритов планетохода, обусловленное большим диаметром колес, при равной с другими схемами продольной статической устойчивости, либо уменьшение продольной устойчивости при сохранении габаритов; сложность обеспечения достаточной осевой жесткости колес большого диаметра."
А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др., «Планетоходы»
Источники:
Виноградов А.П., "Передвижная лаборатория на Луне «Луноход-1». Том 1"
Барсуков В.Л., "Передвижная лаборатория на Луне «Луноход-1». Том 2"
Солодов А.В., "Инженерный справочник по космической технике"
Дополнительно:
Макет первого лунохода (Е-8 №203), доставленного на Луну. Музей космонавтики, г.Москва
Луноход модифицированный под задачи пилотируемых экспедиций. Военно-патриотический парк «Патриот», г.Москва
Марсоход "Марс-94" ("Мир")
Марсоход разработан ВНИИ "ТрансМаш" в 1988 году, прошёл всесторонние испытания по сложному рельефу местности со слабосвязанным грунтами на склонах вулканов Камчатки.


Конструктив: трехсекционный аппарат с шарнирносочлененной рамой, шестью моторами-колесами цилиндрической формы и колесно-шагающим движителем.
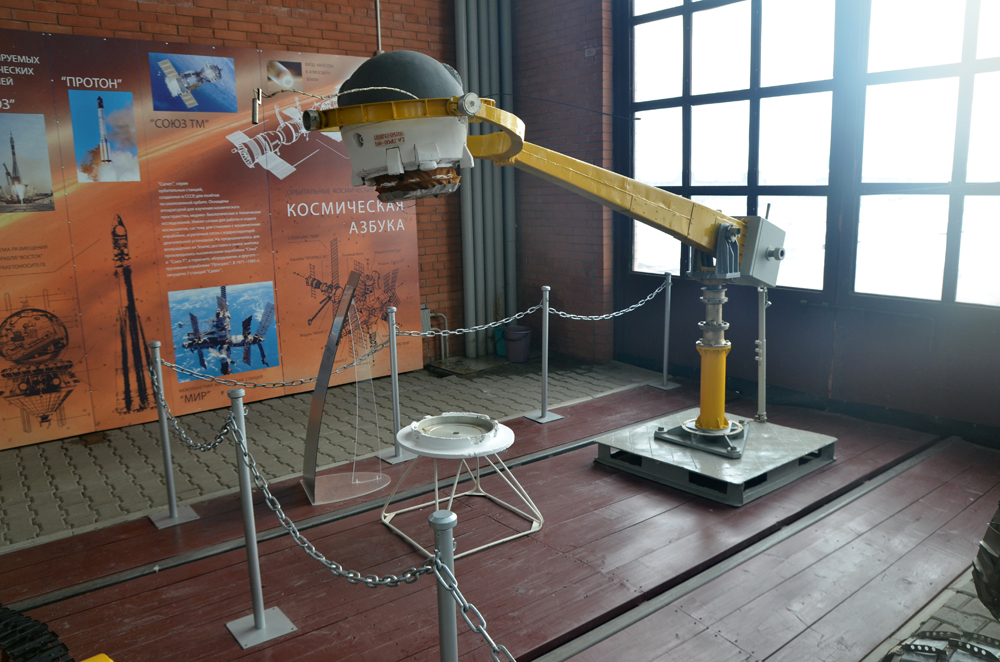
Подвижный аппарат для исследования поверхности Фобоса
Разработан во ВНИИ "ТрансМаш" в 1988 году. Выставленный в музее экземпляр установлен в устройстве разгрузки, имитирующем в земных условиях перемещение аппарата по поверхности Фобоса в условиях пониженной гравитации. Аппарат массой 37 килограмм должен был 10-метровыми прыжками перемещаться по поверхности Фобоса и передавать полученную информацию на расстояние до 300 километров. Лётный образец аппарата был установлен на космической станции "Фобос-2", связь с которой была потеряна.


"Многие малые небесные тела (астероиды, спутники Марса — Фобос и Деймос, а также других планет) имеют весьма низкую силу тяжести. В этих условиях передвижение по поверхности с помощью традиционных движителей может вызвать ряд проблем: обеспечение устойчивости, разгон, торможение и т.д. Вместе с тем, при сверхнизкой гравитации могут быть использованы другие способы передвижения, существенно расширяющие возможности планетоходов.
На небесных телах с низкой гравитацией значительно увеличивается дальность полета по баллистической траектории при заданной начальной скорости. Поэтому весьма эффективным методом передвижения в условиях низкой гравитации может быть передвижение с помощью отдельных прыжков: основной процесс перемещения по поверхности происходит благодаря полету по баллистической траектории. Суть прыгающего способа передвижения состоит в том, что аппарату сообщается некоторая начальная скорость, а дальнейшее его движение осуществляется за счет свободного полета. При этом возможно преодоление препятствий, существенно превышающих размеры самого аппарата. Преодоление таких препятствий при других способах передвижения (например, с помощью колесного, гусеничного, шагающих движителей) невозможно. Кроме того, при прыгающем способе передвижения могут быть использованы те же конструктивные элементы аппарата, которые необходимы для посадки на поверхность (посадочные опоры, устройства ориентирования и др.)
...
Аппарат для прямых исследований поверхности Фобоса состоит из спускаемого блока и узла крепления и отделения спускаемого блока. Спускаемый блок содержит подвижной аппарат и успокоитель, который автоматически отсоединяется от подвижного аппарата после выполнения своей функции по остановке спускае-мого блока на поверхности Фобоса. С помощью узла крепления спускаемый блок закрепляется на базовом КА, а также задается направление и скорость отделения при их расстыковке.
Успокоитель предназначен для уменьшения пути и времени выбега на поверхности после соударения, препятствует скатыванию на склонах, защищает научную аппаратуру и опорную поверхность прыгающего движителя при пёрвых, наиболее опасных ударах о поверхность.
...
Подвижный аппарат состоит из корпуса с защитной оболочкой, служебных систем (энергопитание, радиотелеметрический комплекс, программно-временное устройство, блоки бортовой автоматики и др.), прыгающего движителя с одной выдвижной опорой, устройства ориентирования и комплекта научных приборов.
...
После отделения от КА, подвижный аппарат движется к поверхности под действием силы тяготения по баллистической траектории, параметры которой зависят, в частности, от скоростей базового аппарата в момент отделения, высоты зависания и конкретных значений силы тяжести в данном районе Фобоса. Поэтому время от момента отделения до падения на поверхность может изменяться в значительных пределах. Наиболее вероятно, что этот процесс займет несколько минут. Дальнейшее движение по поверхности представляется в виде последовательно затухающих ударов и качения аппарата на поверхности. После завершения этого процесса происходит отделение успокоителя, совмещенное с первым срабатыванием прыгающего движителя, раскрытие опорных элементов устройства ориентирования. После некоторой выдержки и контроля за успокоением аппарата осуществляется процесс ориентирования.
Суть его состоит в том, чтобы привести подвижный аппарат в положение, когда он опирается на грунт опорой прыгающего движителя. Одновременно при этом обеспечивается необходимый контакт с грунтом научных приборов. Весь процесс соударения аппарата с грунтом и процесс его успокоения фиксируется с помощью устройства измерений ускорений (перегрузки и направления их действия, время ударного импульса, интервалы между ударами).
После этого вступает в работу основная часть научных приборов. После завершения работы включается прыгающий движитель, с помощью которого осуществляются процесс отталкивания от грунта, перемещение в новую точку на поверхности Фобоса, ориентирование и проведение научных экспериментов. Вся информация с подвижного аппарата передается на базовый КА, когда он находится в окрестностях Фобоса".
А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др., «Планетоходы»
Макет шагающего аппарата
Макет шагающего аппарата разработан во ВНИИ "ТрансМаш" в 1985 году. Назначение: проведение экспериментов по отработке шагающего движителя и отработке элементов управления. Аппарат прошёл всесторонние испытания по сложному рельефу местности со слабосвязанным грунтами на склонах вулканов Камчатки.

Платформа с гусеничным движителем
Разработка ВНИИ "ТрансМаш", 1965 год. Использовалась для научно-иследовательских работ по выбору типа движителя для "Лунохода-1". Имеет индивидуальные электромеханические приводы каждой гусеницы. Для рассказа об экспонате вновь обратимся к классическому труду «Планетоходы», созданном коллективом авторов под редакцией Александра Леоновича Кемурджиана. Цитата: "Едва ли не главной и достаточно сложной задачей, которую приходится решать конструкторам планетоходов, является выбор типа движителя и его размеров. Помимо требований, предписываемых конструкцией космического корабля, а также служебным назначением планетохода, необходимо учитывать и требования, связанные с обеспечением максимально возможной проходимости по неорганизованной поверхности, априорная информация о которой, как правило, отсутствует. В лучшем случае сведения о поверхности представляются набором типовых препятствий, в какой-то степени отражающим реальную обстановку. Поскольку планетоходы вынуждены работать только в условиях бездорожья, главная функция их движителя — организация системы внешних сил для перемещения планетохода — должна выполняться в широком диапазоне условий взаимодействия движителя с поверхностью. Этот диапазон определен разнообразием грунтов и рельефа, а также перераспределением нормальных нагрузок на элементах движителя под действием реактивных моментов, поперечных и продольных составляющих веса, динамических нагрузок при преодолении препятствий".

Платформа с гусеничным движителем участвовала в сравнительных испытаниях с восьмиколесным движителем на полигоне ВНИИ "ТрансМаш"
"Конструктивное исполнение этих движителей чрезвычайно разнообразно. В целом это говорит об отсутствии единства взглядов конструкторов на обеспечение подвижности планетоходов в условиях, существенно отличных от земных. Это говорит и о продолжении извечного спора, что лучше: колесо или гусеница.
Колесные планетоходы в сравнении с гусеничными обладают большим коэффициентом полезного действия движителя и более широким набором типов грунтов, на которых возможна эксплуатация планетохода; обеспечивают возможность создания тягового усилия в ведущем и тормозном режимах работы; позволяют отключать часть приводов колес и тем самым выводить электропривод на оптимальный по КПД режим работы; обеспечивают меньшие динамические нагрузки при преодолении выступающих препятствий, возможность прогнозирования недопустимого буксования, преодоление выступающих препятствий больших размеров; обладают более простой конструкцией; из-за отсутствия незащищенных трущихся рабочих поверхностей имеют больший срок службы. При этом планетоходы с колесным движителем обладают примерно равной с гусеничными маневренностью и поворотливостью и обеспечивают примерно равный дорожный просвет.
Преимущества гусеничных планетоходов: более низкое удельное давление на грунт, более высокие показатели по запасу силы тяги на слабонесущих грунтах, более низкая нагрузка на катки, меньшая масса при равной проходимости.
Характерным свойством гусеничного движителя является получение высоких тяговых показателей даже при малых значениях буксования. Причем тяговое усилие мало изменяется с ростом буксования. Однако это качество имеет и отрицательную сторону: представляется достаточно сложным прогнозирование опасности застревания, незначительное изменение внешних условий может привести к полному буксованию и застреванию машины.
В то же время практика работы земных машин показывает, что гусеничный движитель обладает таким существенным недостатком, как расклинка его камнями и сброс гусеницы.
Эти явления можно считать типичными для гусеницы даже для условий, когда водитель имеет информацию о потенциальной опасности попадания камней и грунта между ведущим или направляющим колесами и гусеничным обводом. Очевидно, что гусеничные планетоходы, выполненные по классическим схемам, не застрахованы от подобной опасности, Более того, анализ условий работы планетоходов показывает, что попадание деформируемого слабонесущего грунта, а также отдельных камней в гусеничный движитель следует считать характерным для его работы. При этом в гусеничном обводе, несущей конструкции, подвеске и других элементах ходовой части могут возникать усилия, превышающие расчетные, по крайней мере на легких планетоходах, что может привести к необратимым деформациям элементов ходовой части и даже полной потери работоспособности.
Увеличение массы планетохода и соответственно массы гусеницы приводит к относительному выравниванию предельно допустимых и возможных нагрузок при расклинке гусеничного движителя. Это обстоятельство говорит о том, что гусеница как движитель имеет меньше недостатков в случае ее применения на тяжелых планетоходах с силой тяги свыше 10000 Н. Использование ее на планетоходах с более низкой тягой может быть оправдано только в случаях воз-можности проведения ремонтно-восстановительных работ. Альтернативой этому следует считать проведение комплекса мероприятий по исключению попадания больших масс грунта и отдельных камней в гусеницу. Вероятным вариантом следует считать и поиск таких конструктивных решений гусеничного движителя, которые бы исключали возможность возникновения сколько-нибудь опасных усилий при расклинке гусеницы.".
А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др., «Планетоходы»
Платформа с колесно-шагающим движителем
Разработка ВНИИ "ТрансМаш", 1972 год. Использовалась для научно-иследовательских работ по созданию колесно-шагающих движителей. Прошла всесторонние испытания по сложному рельефу местности со слабосвязанными грунтами на склонах вулканов Камчатки. Платформа имела два режима: колесный и колесно-шагающий. Первый - традиционный, во втором - без отрыва от опорной поверхности поочередное перемещение с помощью механизмов шагания одного или нескольких колес относительно корпуса шасси с одновременным приложением к ним крутящих моментов, что позволяет увеличить свободную тяговую силу движителя. В изделии используются мотор-колеса аналогичные примененным в «Луноход-1»".

"... колесно-шагающий движитель можно представить как обычный шагающий, у которого опоры механизмов шагания выполнены в виде колес, которые в определенной последовательности то выносятся вперед по опорной поверхности на величину шага (этап переноса колес), то останавливаются на опорной поверхности и с помощью механизмов шагания перемещают корпус транспортного средства вперед на величину шага (этап отталкивания колес). В зависимости от характера перемещения корпуса транспортного средства следует различать два принципиально разных по методам реализации способа передвижения: способ непрерывного передвижения корпуса транспортного средства (не-прерывные походки) и способ прерывного передвижения корпуса транспортного средства (прерывные походки).
...
В чисто шагающем движителе передвижение осуществляется при наличии лишь одного вида перемещения — шагания. В колесно-шагающем кроме шагания существует еще и вращение колес. Наличие этих двух видов перемещений накладывает некоторые дополнительные ограничения на параметры движителя для обеспечения эффективного передвижения.
Так, при осуществлении указанного выше способа непрерывного колесно-шагающего передвижения колеса будут перекатываться по опорной поверхности с различными угловыми скоростями в соответствии с этапами перемещения. Очевидно, что для реализации эффективного передвижения в качестве первого условия необходимо, чтобы колеса перемещались по опорной поверхности без излишних юзов и буксований.
...
... принципиальная схема совмещенного привода колесно-шагающего движителя. Сущность этой схемы заключается в том, что шагание и вращение колеса производятся от одного тягового двигателя через блокирующий механизм, предназначенный для обеспечения необходимой кинематики движения во всех режимах работы движителя. В соответствии с функциональным назначением следует отличать блокирующие механизмы, которые обеспечивают жесткую блокировку между приводами шагания и вращения колеса на этапе переноса колеса и сохраняется либо постоянным, либо изменяется по определенному закону), и механизмы, которые обеспечивают частичную блокировку между приводами шагания и вращения колес в зависимости от внешних условий передвижения."
А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др., «Планетоходы»