Выставка «Космические войска: через тернии к звёздам». Военно-патриотический парк «Патриот»
Навигация по странице:
Космический корабль «Восток»
Лунный корабль 11Ф94
Луноход модифицированный под задачи пилотируемых экспедиций
Геодезический спутник «Гео-ИК», 11Ф666
Навигационный спутник «Глонасс-М», 11Ф654М
Спускаемый аппарат разведывательного спутника «Зенит-2», 11Ф61
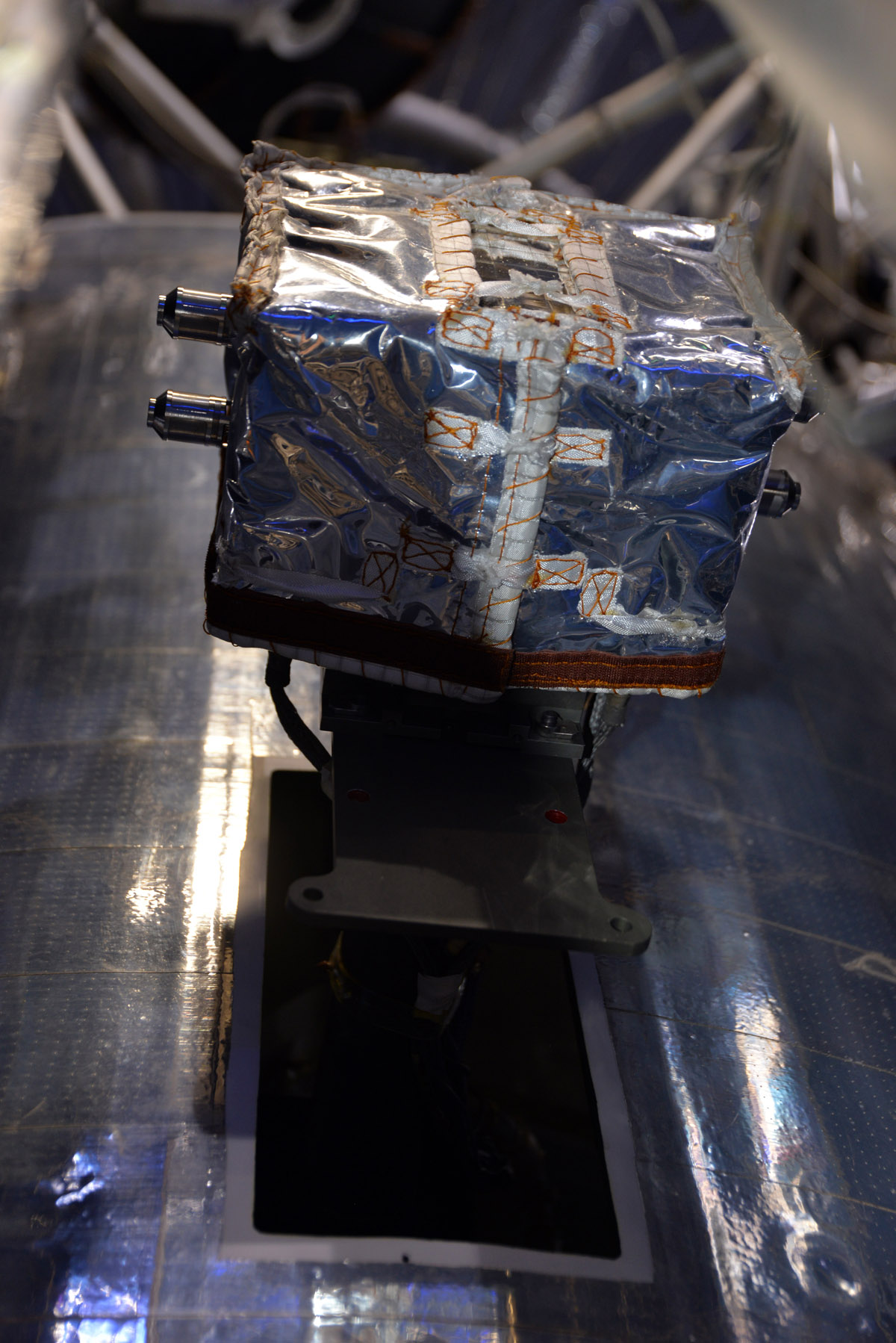
Отсек специальной аппаратуры спутника видовой разведки «Янтарь-2К», 11Ф624
Спутник-мишень «Лира», 11Ф631
Телекоммуникационный спутник-ретранслятор «Луч», 11Ф669
Телекоммуникационный спутник-ретранслятор «Луч-2»
Спутник связи «Радуга-1М», 17Ф15М
Спутник связи «Стрела-1М», 11Ф625
Спутник связи «Стрела-2М», 11Ф626
Спутник связи «Гонец-Д1»
Спутник связи «Гонец-М»
Навигационный спутник «Парус», 11Ф627
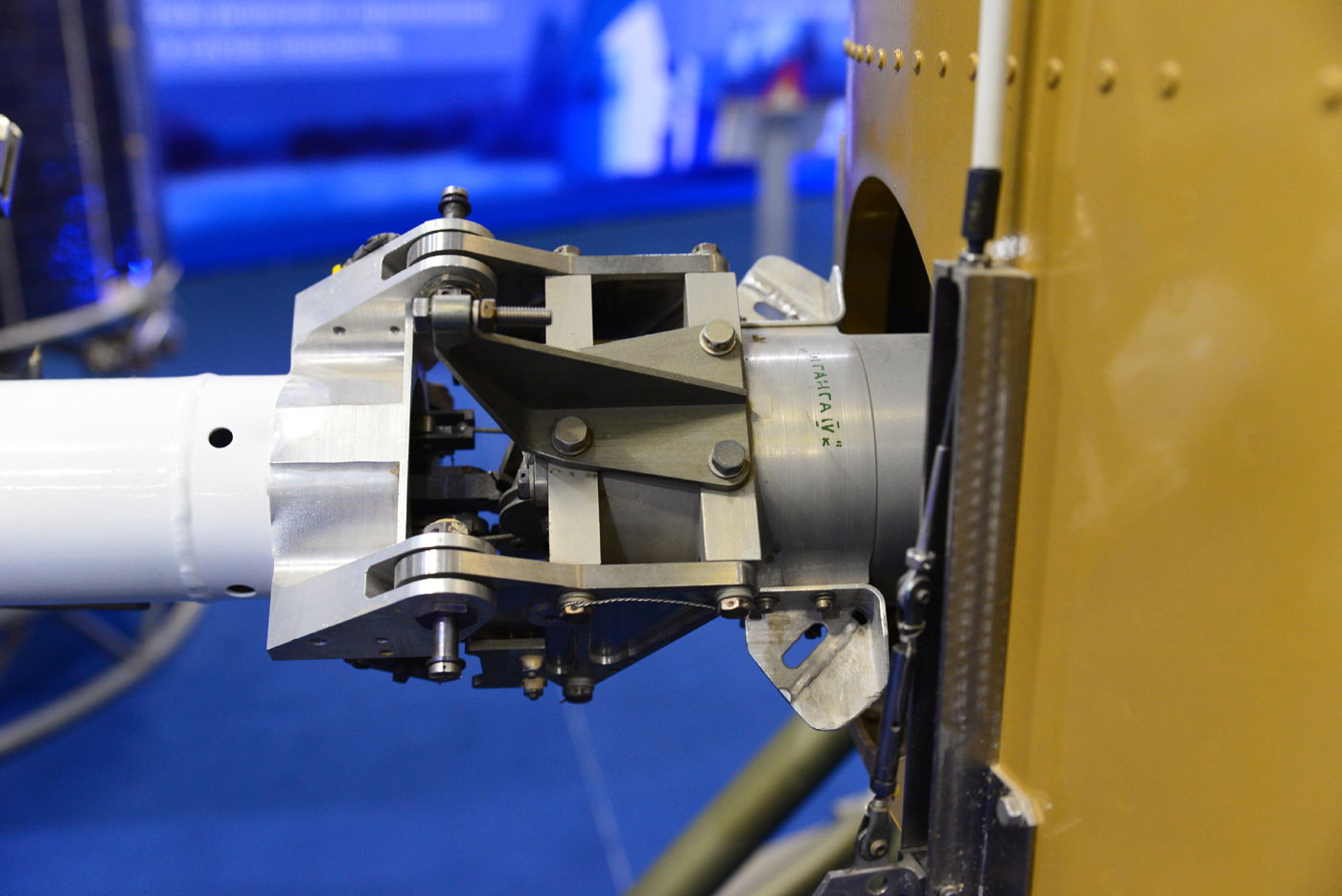
Двигательная установка системы аварийного спасения космического корабля «Союз–ТМА»
Месторасположение: Московская область, 55 км трассы М-1 (Минское шоссе)
Официальный сайт: Военно-патриотический парк культуры и отдыха Вооружённых Сил Российской Федерации «Патриот»
Дополнительно::
Парк «Патриот». Техника стран-участников антигитлеровской коалиции
Парк «Патриот». Бронетехника нацистской Германии
Парк «Патриот». Бронетехника стран нацистского блока и трофеи вермахта
Парк «Патриот». Современная лёгкая отечественная бронетехника
Парк «Патриот». Авиация
Парк «Патриот». Артиллерия и САУ
Парк «Патриот». Ракетная техника и РСЗО
Парк «Патриот». Техника ПВО
Парк «Патриот». Автотехника, мотоциклы и бронемашины
Парк «Патриот». Отечественные танки
Парк «Патриот». Инженерная и другая специальная техника
Парк «Патриот». Экспозиция, посвящённая локальному конфликту в Сирии
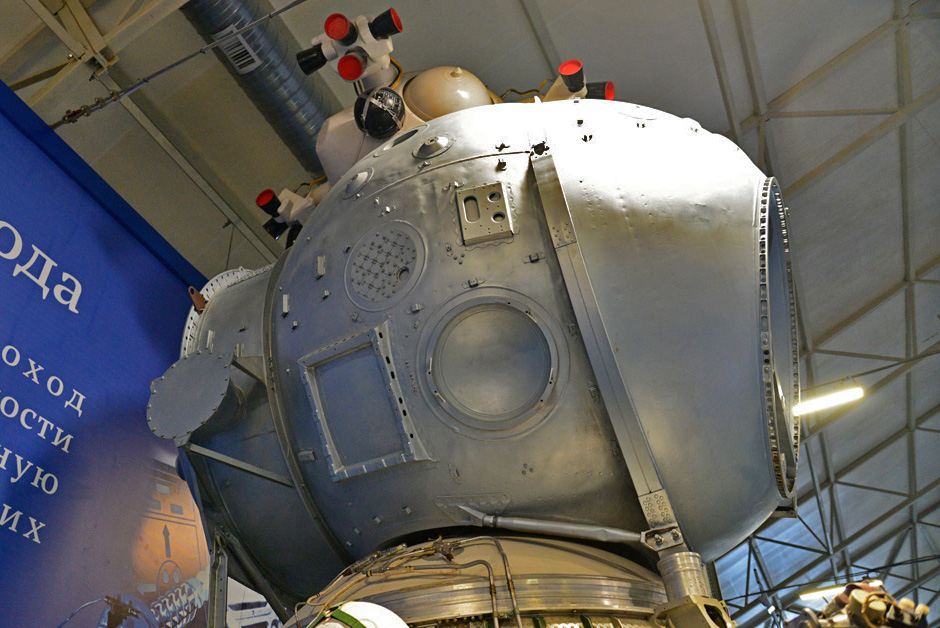
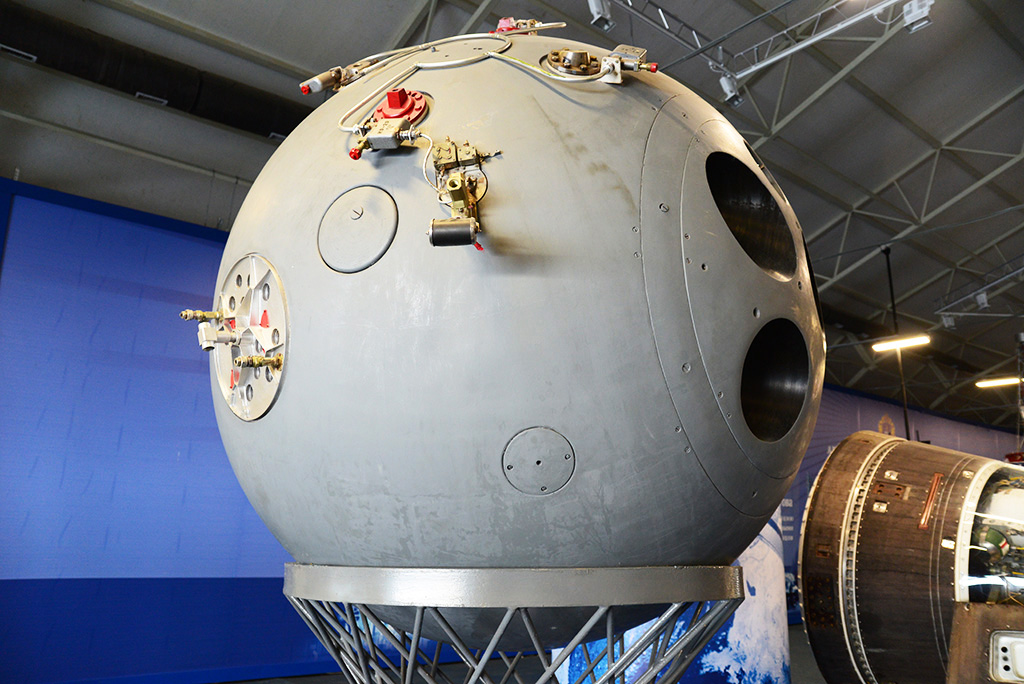
Космический корабль «Восток» («Восток-ЗА», заводское обозначение — «обьект ЗКА»)
Проект создания первого космического корабля осуществлялся в 3 этапа: «Восток-1П», «Восток-1», «Восток-3». На корабле «Восток-1П» (заводское обозначение 1КП) отрабатывались основные системы, ориентация в пространстве, управление. Для проверки систем жизнеобеспечения предназначался «Восток-1» (11Ф61, заводское обозначение 1К) на котором в космос отправлялись собаки и более мелкая живность. На этом же корабле отрабатывали основные системы проектируемых космических аппаратов: спутника-фоторазведчика «Восток-2» и пилотируемого корабля «Восток-3». «Восток-3» (11Ф63, заводское обозначение 3К) должен был стать штатным кораблём для полёта человека в космос. В борьбе за вес и простоту конструкции родился вариант корабля на котором отказались от дублирующей тормозной двигательной установки. Так появился «Восток-ЗА» – рабочая лошадка первых советских космонавтов. Обозначение «Восток-4» получил спутник-фоторазведчик, затем переименованный в «Зенит».

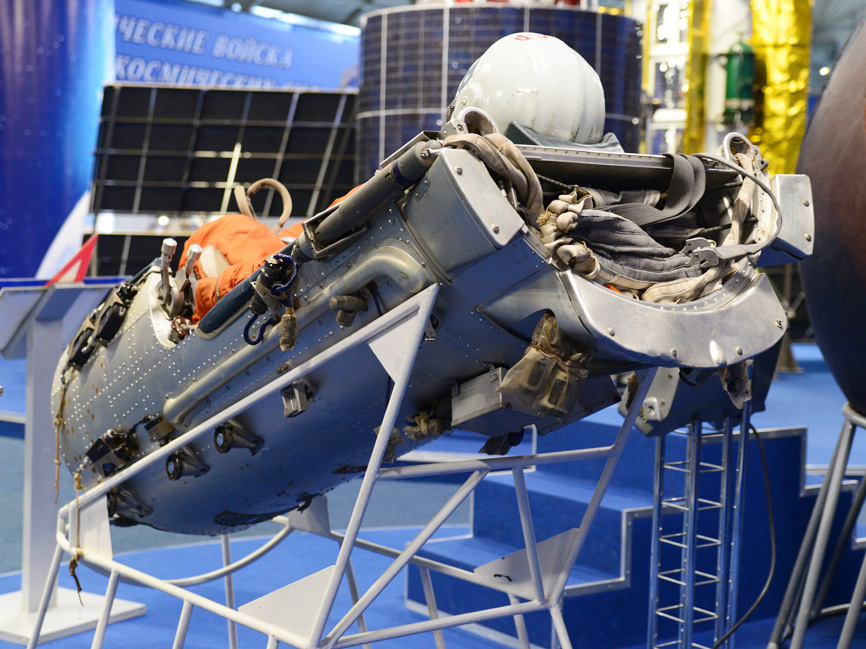
Спускаемый аппарат космического корабля «Восток». Проём входного люка закрыт оргстеклом. Тормозной и основной парашюты уложены в парашютный контейнер в зоне заголовника кресла, запасной – в ранец на отделяемой от кресла спинке. Справа от люка, в отверстиях должны находиться разъёмы для стыковки кабель-мачты, соединяющей спускаемый аппарат и приборно-двигательный отсек

Красным цветом окрашен каркас катапультной установки. Космонавт одетый в скафандр, размещался в специальном катапультируемом кресле. На последнем этапе посадки, после торможения спускаемого аппарата в атмосфере, на высоте 7 км, космонавт катапультировался из кабины. После отделения от кресла он приземлялся на парашюте

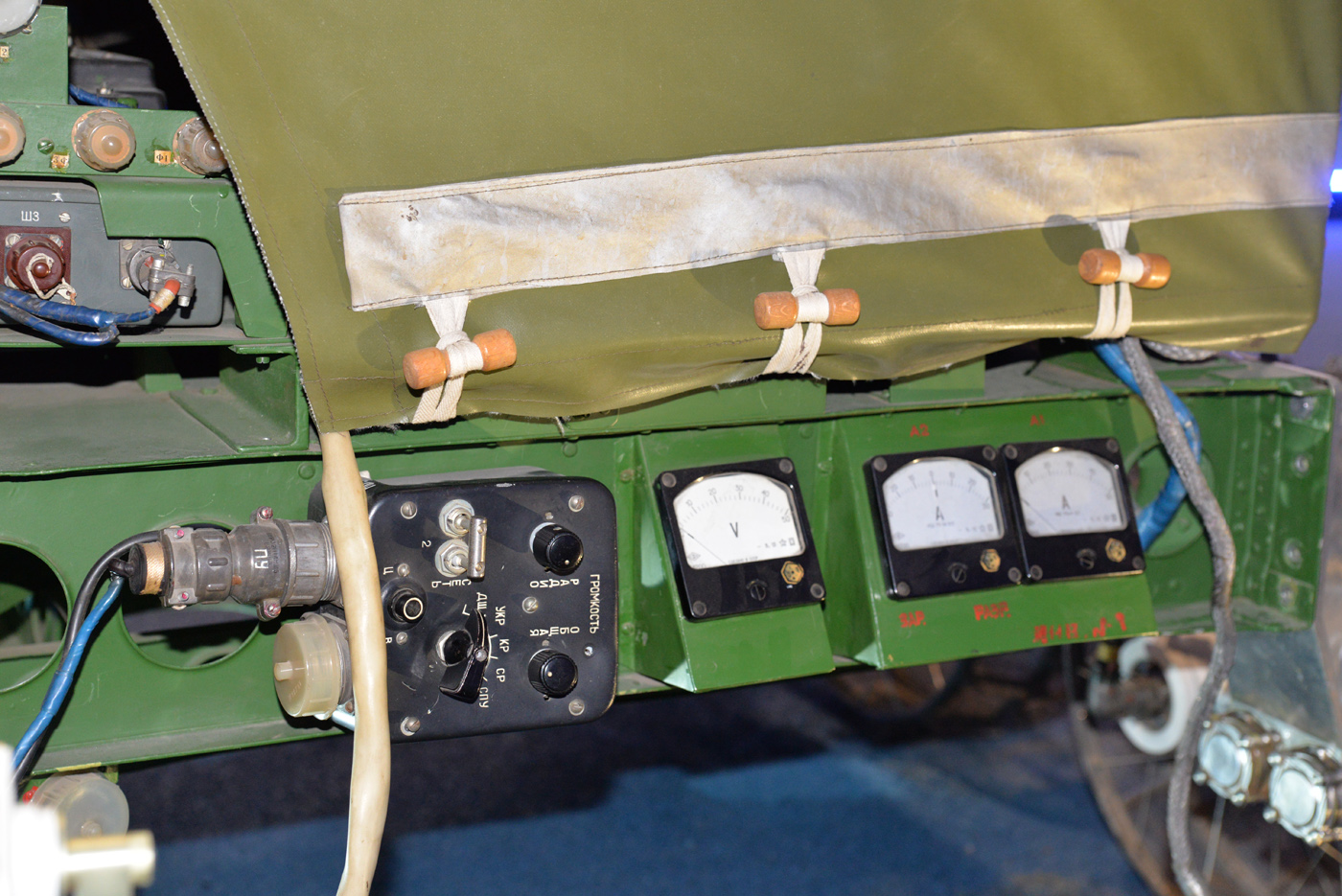
Приборная доска ПД-2-3КА с индикатором местоположения (ИМП). Кроме неё в состав системы СИС-2-3КА (система управления кораблём «Восток») входили: пульт ПУ-2-3КА и ручка управления ориентацией корабля РУ-1Б. ИМП: глобус с часовым механизмом показывал текущее положение корабля над Землёй, помогая космонавту определить начало манёвра возвращения

Макет пульта в корабле изготовлен халтурно. Световые табло – имитация. Над глобусом нет индикатора "Посадка". В правом нижнем углу отсутствует трёхстрелочный индикатор давления газа в шар-баллонах систем автоматической, ручной ориентации и тормозной двигательной установки
Первый запуск корабля ЗКА был проведён 9 марта 1961 г. Корабль был укомплектован всеми бортовыми системами, собакой Чернушка и манекеном человека, который в шутку был назван разработчиками "Иван Иванович". Внутри манекена (в грудной полости, полости живота и т.п.) были размещены мыши, морские свинки, микробы и другие биологические объекты в целях изучения влияния радиационного излучения, а внутри СА – семена растений, элементы крови человека и др. Программа полёта была выполнена, аппаратура работала безотказно, СА с собакой нормально приземлился, а манекен катапультировался.
25 марта 1961 г. был запущен корабль ЗКА N2 в той же комплектации с собакой Звездочка. Программа полёта корабля также была выполнена. СА с собакой нормально приземлился. Манекен штатно катапультировался.
Этим пуском была закончена экспериментальная отработка пилотируемого космического корабля "Восток" (ЗКА) в лётных условиях. К моменту окончания лётной отработки КК "Восток" (ЗКА) было произведено более 46 пусков ракеты-носителя Р-7 (I и 2 ступеней ракеты 8К71) и 16 запусков блока Е (III ступень) ракеты-носителя 8К72. Из 16 блоков Е шесть блоков не сработали из-за аварии РН и два блока – из-за аварий самого блока. Из семи кораблей "Восток" (1К и ЗКА) два корабля не вышли на орбиту из-за аварий РН на активном участке траектории и два корабля не полностью выполнили задачи полёта.
Опыт показал также, что полёты собак на кораблях "Восток" происходили с некоторыми сдвигами в их физиологическом состоянии. Симптомы стали проявляться после четвёртого витка полёта. Это заставило планировать первый предстоящий полёт человека в космическое пространства продолжительностью не более одного витка с максимальной автоматизацией режимов управления.
Государственная комиссия приняла решение о возможности полёта человека в космос на корабле "Восток" (ЗКА). Программа пилотируемых космических кораблей "Восток" (ЗКА) включала запуск шести пилотируемых кораблей, в том числе полёт первой женщины и групповые полёты двух пар кораблей.
12 апреля 1961 г. в 9 час 06 мин 59,7 с был запущен космический корабль "Восток" (ЗКА), получивший название в печати "Восток", с лётчиком-космонавтом Ю.А.Гагариным. Космический корабль массой 4725 кг был выведен на орбиту с перигеем 181 км и апогеем 327 км. Полёт продолжался около 108 мин. Приземление космонавта произошло в 10 ч 55 мин на мягкую пашню у берега Волги вблизи деревни Смеловка Терновского района Саратовской области. Это было безусловно выдающимся достижением.
Источник: Гудилин В.Е., "«Восток» и «Восход»"
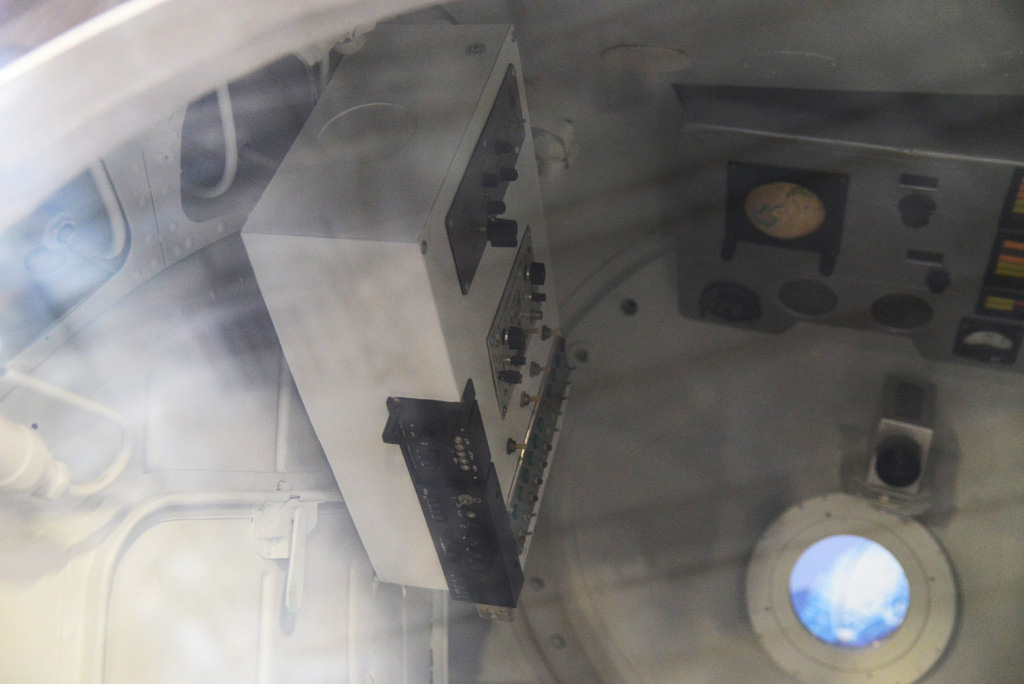
Расположение приборов и органов управления в кабине корабля «Восток». Слева – кустарно изготовленный макет пульта управления. На полу кабины – телекамера и иллюминатор с оптическим ориентатором «Взор». Над ними – макет приборной доски с ИМП
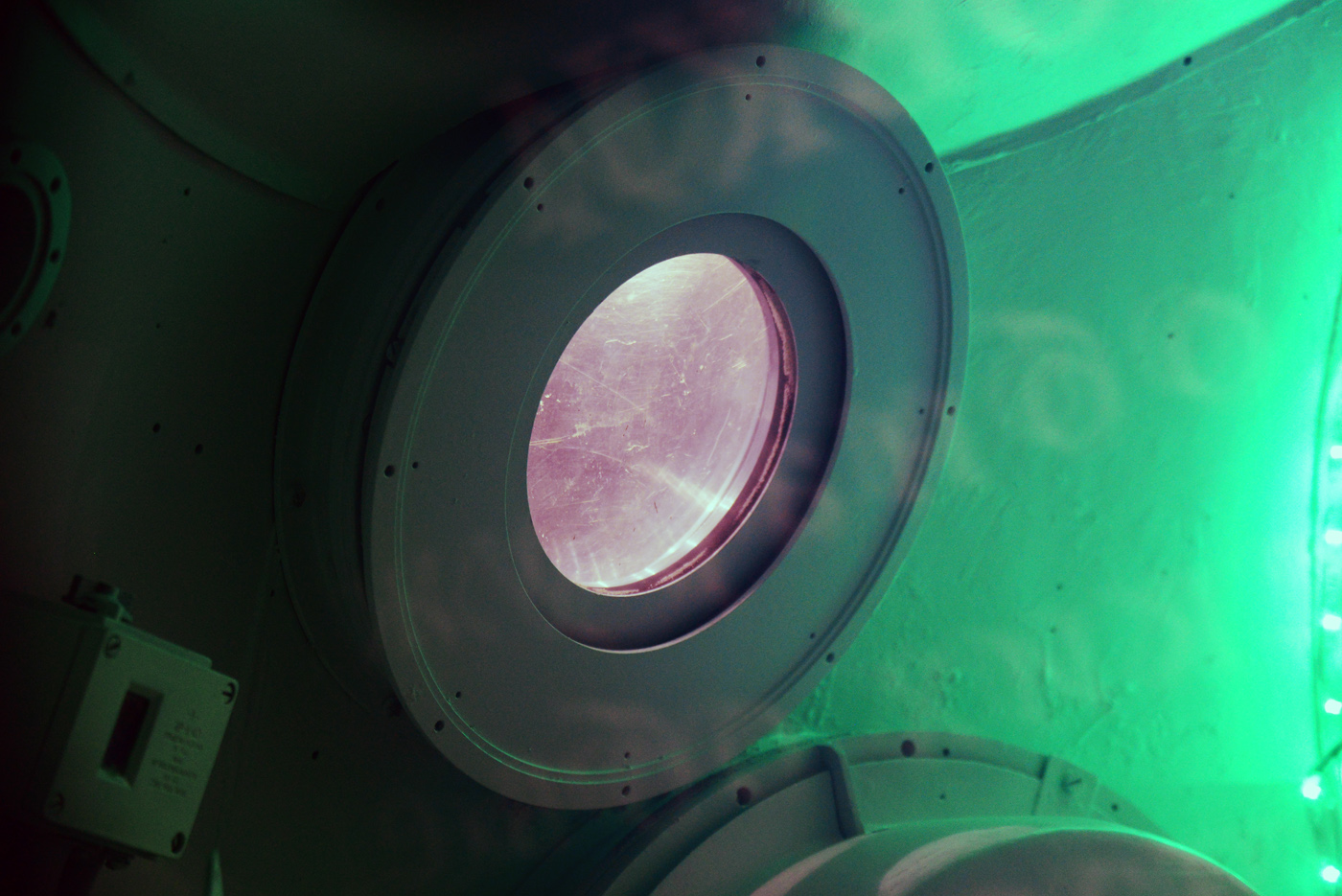
«Восток» имел имел три иллюминатора. Первый – в отстреливаемой крышке входного люка, чуть выше головы космонавта. Второй – в полу кабины, в крышке технологического люка. На нём крепился оптический ориентатор «Взор». Третий – сверху и справа от космонавта.


Обстоятельств выбора имени космического корабля отражены в воспоминаниях В.В. Молодцова (из группы К.П. Феоктистова).
"Надо сказать, что пульт пилота космического корабля не имел аналогов ни в авиации, ни в других отраслях. С этого пульта можно было управлять включением и выключением бортовых систем, получать визуальную информацию об их состоянии, а также управлять динамикой и ориентацией всего корабля в целом. В работе над составом команд управления Макарову помогал А.И.Базарный. До передачи работ по проектированию приборного отсека Макаров занимался компоновкой приборного оборудования на приборной раме, находящейся в открытом вакууме.
Может быть, мной, а может быть, кем-то из сотрудников нашей группы было предложено использовать маленький глобус в качестве навигационного прибора, указывающего на положение корабля на орбите и на прогнозируемое место его приземления. В то время идея, возникшая в чьей-то голове, немедленно становилась достоянием коллектива, то есть имел место изредка возникающий эффект, который я называю Коллективным разумом. Надо сказать, что многие возникавшие тогда идеи являлись подлинными изобретениями, но никто и не думал оформлять индивидуальные и даже коллективные заявки на эти изобретения. Времени на оформление этих бюрократических процедур не было. Все время поглощалось творческой работой.
Как, например, появилось название корабля "Восток"? А вот как. Однажды состоялся неофициальный конкурс предложений по названию корабля. Предлагалось несколько вариантов. Я же предложил название "Восток". Подоплекой здесь был известный в то время афоризм "Ветер с Востока преобладает над ветром с Запада ", а поскольку, создавая свой корабль, мы стремились опередить Запад, т.е. Америку, то слово Восток как раз подходило для названия корабля. Этот вариант был одобрен и принят руководством в качестве официального названия корабля".

Возле левого колена космонавта видны корпуса баровременных автоматов системы автоматики кресла, которые после отделения катапультной установки от аппарата вели автономный отсчёт времени и высоты полета, а также управляли парашютной системой.

На шильдике катапультной установки: №30, декабрь 1962 года. Кресло имело форму усеченного конуса, в его верхней части располагался парашютный контейнер, в котором укладывались парашюты (основной и тормозной)

В верхней части каркаса кресла, вокруг парашютного контейнера, аэродинамические щитки системы стабилизации, которые вместе с конической формой кресла обеспечивали заданные аэродинамические характеристики катапультной установки
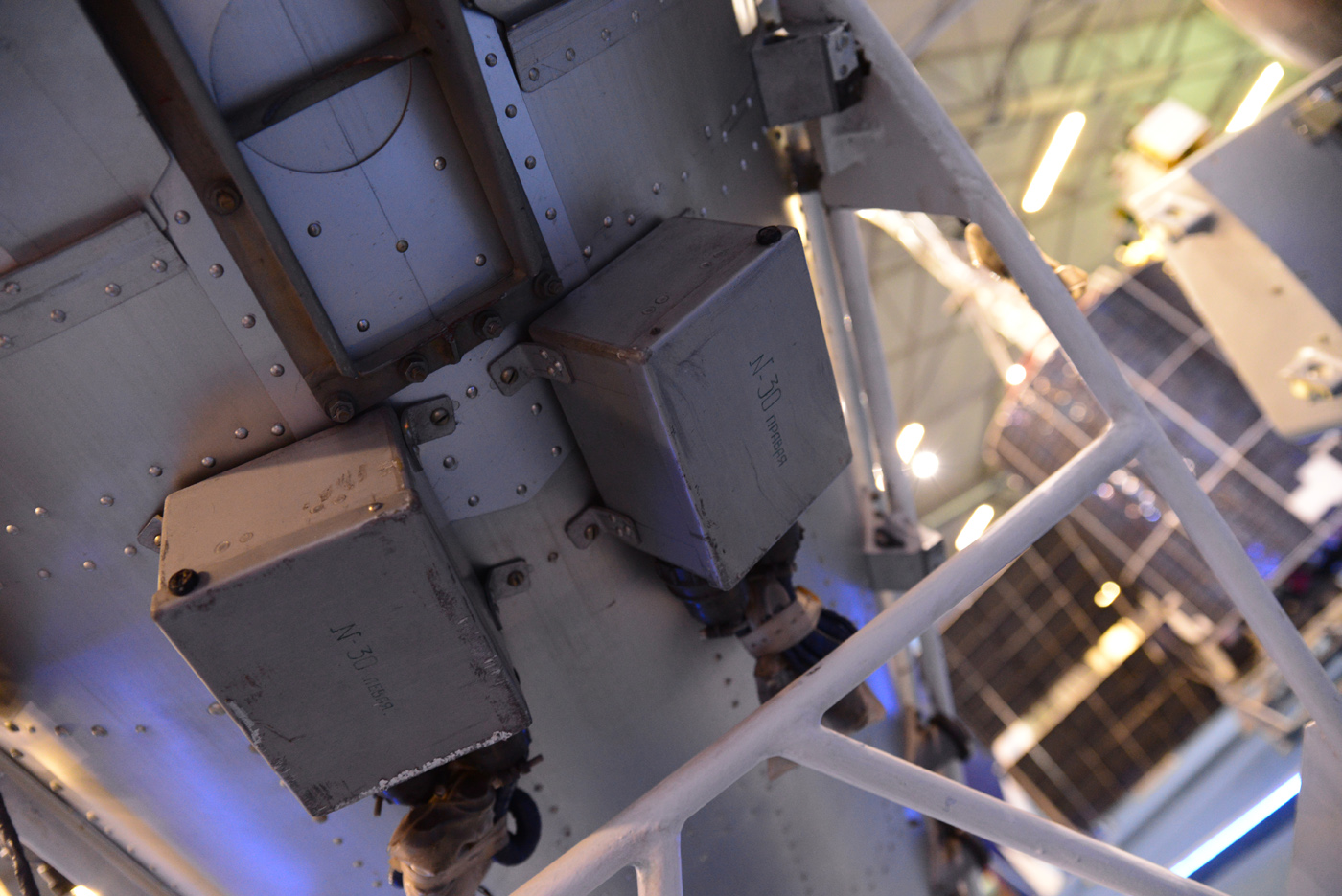
С тыльной стороны кресла видны коробки блоков реле системы автоматики. Стреляющий механизм и пороховые ракетные двигатели демонтированы
«Восток» был полностью автоматизированным кораблем. Но пилот мог взять управление на себя, то есть сориентировать корабль для включения тормозного двигателя. Для этого были установлены ручные органы управления, в какой-то степени подобные тем, с которым имеют дело летчики. Но если в самолете ручка управления непосредственно (или через усилители) воздействует на управляющие органы крыла и оперения, то в космическом корабле от ручки идут сигналы на датчики угловых скоростей, которые, в свою очередь, выдают команды на управляющие органы — включают и выключают маленькие реактивные двигатели. Но одной ручки для управления полетом, естественно, мало. Нужно еще иметь устройство, с помощью которого пилот может установить корабль в нужное положение. На самолете для этого есть хороший внешний обзор, а также приборы — авиагоризонт, гирокомпас и прочие. На космическом корабле для тех же целей появился «Взор» — специальный иллюминатор с прибором для визуальной ориентации. При правильной ориентации корабля космонавт мог видеть через центральную часть прибора бег Земли, то есть контролировать курс, а через кольцевое зеркало — горизонт, чтобы управлять по тангажу и крену.
Этот иллюминатор, как и два боковых окна диаметром по 200 миллиметров, которые мы предусмотрели в проекте спускаемого аппарата, наши конструкторы встретили в штыки. Очень им не хотелось связываться со стеклом и его уплотнениями. Но все-таки сделали, и все хорошо работало. Для космонавта была разработана полетная инструкция. Умещалась она на нескольких листочках бумаги, не то что сейчас — много книг.
Гагарин инструкцию, кажется, сразу наизусть выучил. В день перед полетом мы вместе с Раушенбахом проводили с Гагариным последний инструктаж и проверяли его готовность. Нам было важно, чтобы он в полете случайно что-нибудь не то не включил. Часа полтора демонстрировали ему свою эрудицию. Он сидел спокойный, улыбался — он уже все это помнил, ничего не забыл и не забудет.
Источник: Феоктистов К.П. "Траектория жизни. Между вчера и завтра."

Полёты на кораблях Восток космонавты выполняли в скафандре СК-1, подключенном к бортовой системе жизнеобеспечения (СЖО). СК-1 разрабатывался инженерами томилинского завода №918 на основе защитного костюма «Воркута», созданного для пилотов самолета-перехватчика Су-9.

Существует предполётное фото Гагарина в шлеме скафандра без надписи. Перед стартом обнаружилось, что на скафандре отсутствуют опознавательные знаки. Инженер «Звезды» Виктор Давидьянц вывел красной краской на уже надетом на Ю.А.Гагарина шлеме надпись «СССР»

Чуть выше нарукавного зеркала – отверстие в чехле, через которое выводились системы подключения скафандра к СЖО корабля (для вентиляции воздуха и выравнивания давления внутри скафандра). У экспоната эти коммуникации отсутствуют

СК-1 сшит из двух слоёв: силового лавсанового и герметичного резинового. Шлем отделён от оболочки резиновой шторкой, герметизирующейся по шее космонавта. Вниз надевался комбинезон, в который монтировались трубопроводы системы вентиляции. Оранжевый чехол служил для облегчения поисковых работ.

Лунный корабль 11Ф94
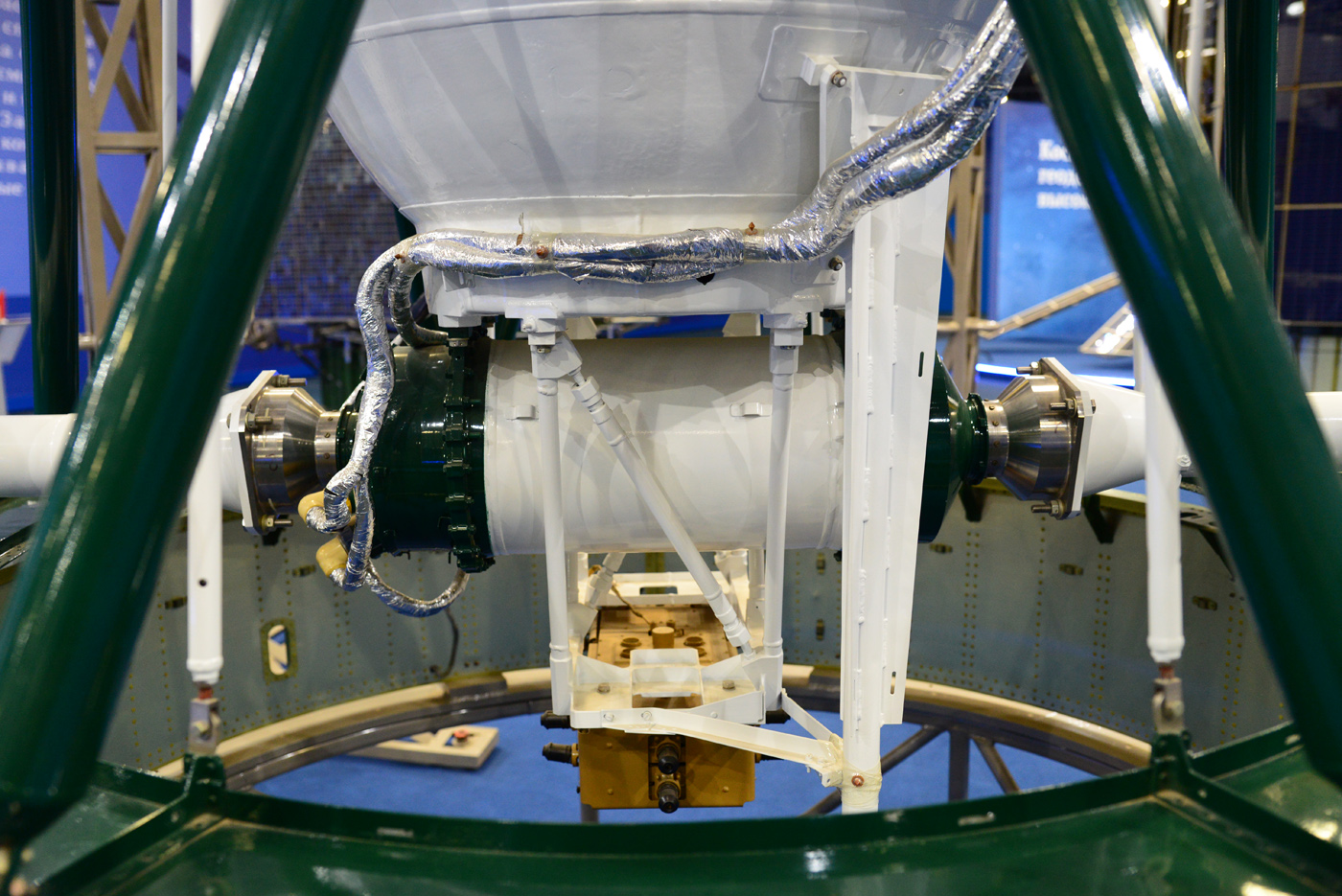
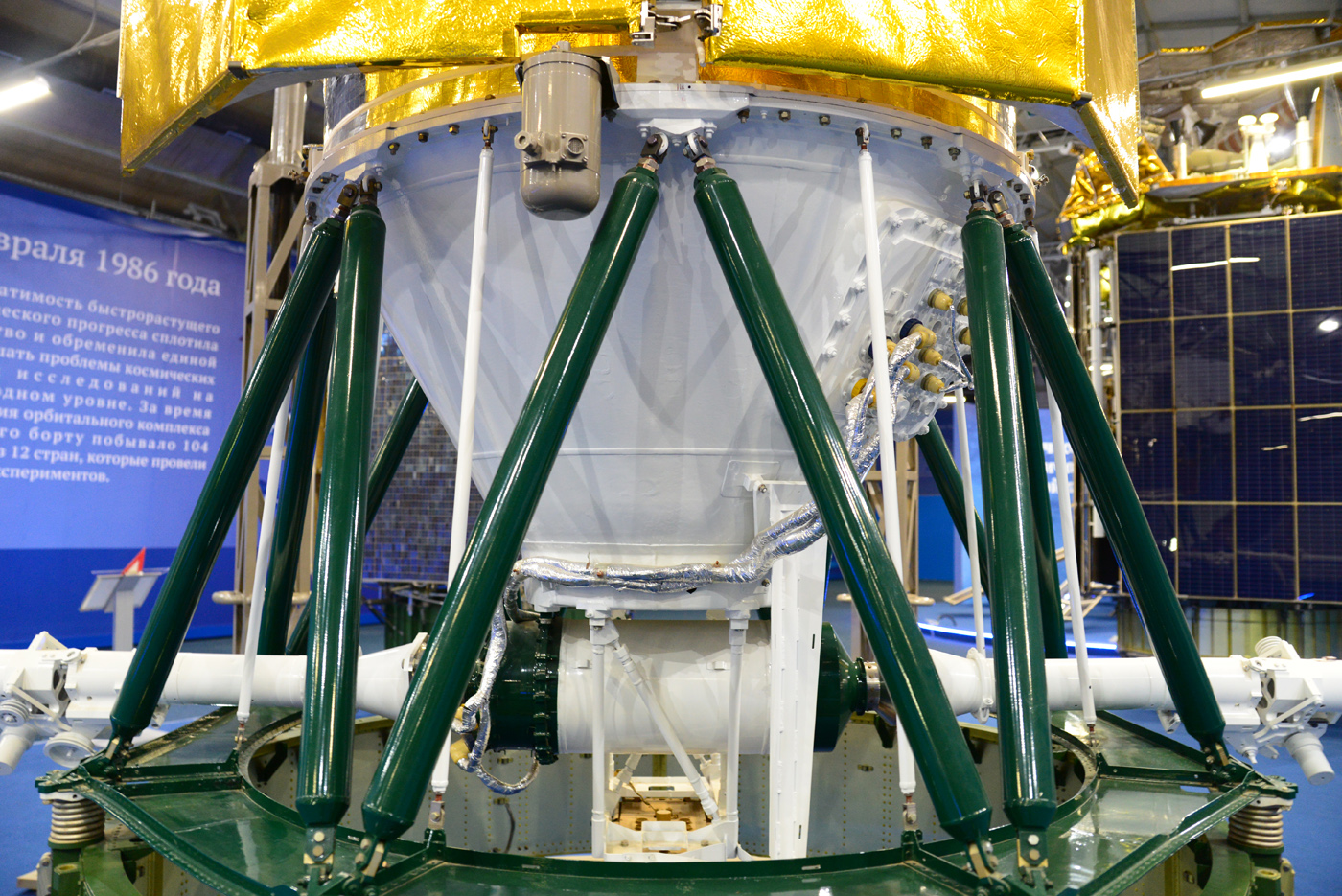
Основными частями ракетно-космической системы для высадки на Луну по проекту Н-1—Л3 были лунный орбитальный корабль «Союз-7К-ЛОК», лунный посадочный корабль ЛК и сверхтяжёлая ракета-носитель Н1. Первоначальный план лунной экспедиции С.П. Королёва опирался на трехпусковую схему. Первый пуск – беспилотный грузовой корабль, за ним — два пуска пилотируемых кораблей. Транспортник забросит луноход, электростанцию мощностью три-пять киловатт, радиостанцию с остронаправленной антенной для телевизионных передач, запасы кислорода, воды и пищи на месяц-другой. Этому автоматическому ЛК не нужна будет взлётная ступень, поэтому масса доставляемого груза будет очень большой. Вторым взлетает носитель с орбитальным кораблём-модулем 7К-ЛОК, на котором летят четыре или пять космонавтов. Третьим стартует беспилотный лунный корабль. Они стыкуются на орбите у Луны, затем спускаемый аппарат ЛК садится максимально близко с транспортным кораблём. По окончании посадочной программы лунный корабль должен был взлететь с Луны и состыковаться с орбитальным кораблём. Затем орбитальный корабль переходит на траекторию полёта до Земли.


"Система Л3 состоит из разгонных ракетных блоков «Г» и «Д», ЛОКа (собственно корабль и ракетный блок «И») и ЛК (собственно корабль и ракетный блок «Е»), головного обтекателя, сбрасываемого при достижении определенных скоростных напоров, и двигательной установки системы аварийного спасения.
ЛОК состоит из спускаемого на Землю аппарата и бытового отсека, на котором расположен специальный отсек с двигателями ориентации и причаливания и агрегатом системы стыковки, приборно-агрегатного отсека и энергетического отсека, в котором размещается ракетный блок «И» и ЭХГ — электрохимический генератор системы электропитания на кислородно-водородных топливных элементах. Бытовой отсек ЛОКа одновременно служит шлюзовой камерой при переходе космонавта через открытый космос в лунный корабль перед спуском на Луну и при возвращении. Все путешествие от Земли до Луны космонавты совершают без скафандров. Скафандр надевается космонавтом перед переходом из ЛОКа в ЛК.
ЛК состоит из герметичной кабины космонавта, отсека с двигателями ориентации и «пассивным» агрегатом стыковки приборного отсека, лунного посадочного устройства и ракетного блока «Е». Электропитание всех систем ЛК осуществляется аккумуляторными батареями, установленными снаружи. Управление посадкой впервые в отечественной практике ведется с помощью БЦВМ и частично дублируется ручной системой, которая позволяет космонавту совершать ограниченный маневр для выбора места посадки".
Источник: Черток Б.Е., "Ракеты и люди"
Лунный корабль 11Ф94 — спускаемый аппарат, космический корабль-модуль пилотируемого экспедиционного комплекса Л3. Сохранилось пять ЛК: в филиале университета им. Баумана (Орево), РКК "Энергия" (г.Королёв), МАИ, академии Можайского (г.Санкт-Петербург) и в Арсенале Космических войск (посёлок Знаменка, Тамбовская область). Судя по маркировке 27265 (ДЛЯ ИЗД Е4020-000А 7А1Л), в парк «Патриот» перевезли "тамбовский" экземпляр лунного корабля. Этот, несколько разукомплектованный, экземпляр предназначался для динамических испытаний.


Наибольшим успехом советской лунно-посадочной программы стал успешный рейс космического аппарат «Союз» 7К-Л1 №12 с облётом спутника Земли. Запущенный 10 ноября 1968 года, корабль в автоматическом режиме успешно выполнил черно-белое и цветное фотографирование поверхности Луны и вернулся на Землю. Впервые за всю историю запусков 7К-Л1 был осуществлен управляемый спуск на территорию СССР при возвращении от Луны со второй космической скоростью. Однако у самой земли опять случился досадный ляп. Стренги наполненного парашюта были отстреляны на высоте 5300 метров. К счастью, при ударе о землю 10 килограммов тротила системы АПО не взорвались.
Следует отметить что всего было изготовлено 15 экземпляров КК 7К-Л1, из которых только 5 совершили успешные или частично успешные полёты.
Луноход модифицированный под задачи пилотируемых экспедиций
По программе создания дистанционно управляемых самоходных планетоходов для исследования Луны («Проект Е-8») было построено четыре аппарата. Первый аппарат (Е-8 №201) погиб 19 февраля 1969 года в результате неудачного старта ракеты-носителя. Второй планетоход (Е-8 №203) благополучно прибыл на Луну 17 ноября 1970 года. Третий луноход (Е-8 №204) приступил к работе на поверхности Луны 16 января 1973 года. В 1970–1973 годах эти два лунохода прошли по Луне в общей сложности 47 километров. Четвёртый экземпляр сейчас находится в музее НПО имени С. А. Лавочкина. В 1977 году его должен был доставить на Луну корабль-автомат «Луна-25», но запуск не состоялся. Экспонат, выставленный в парке «Патриот», имеет назначение несколько отличное от вышеперечисленных планетоходов.
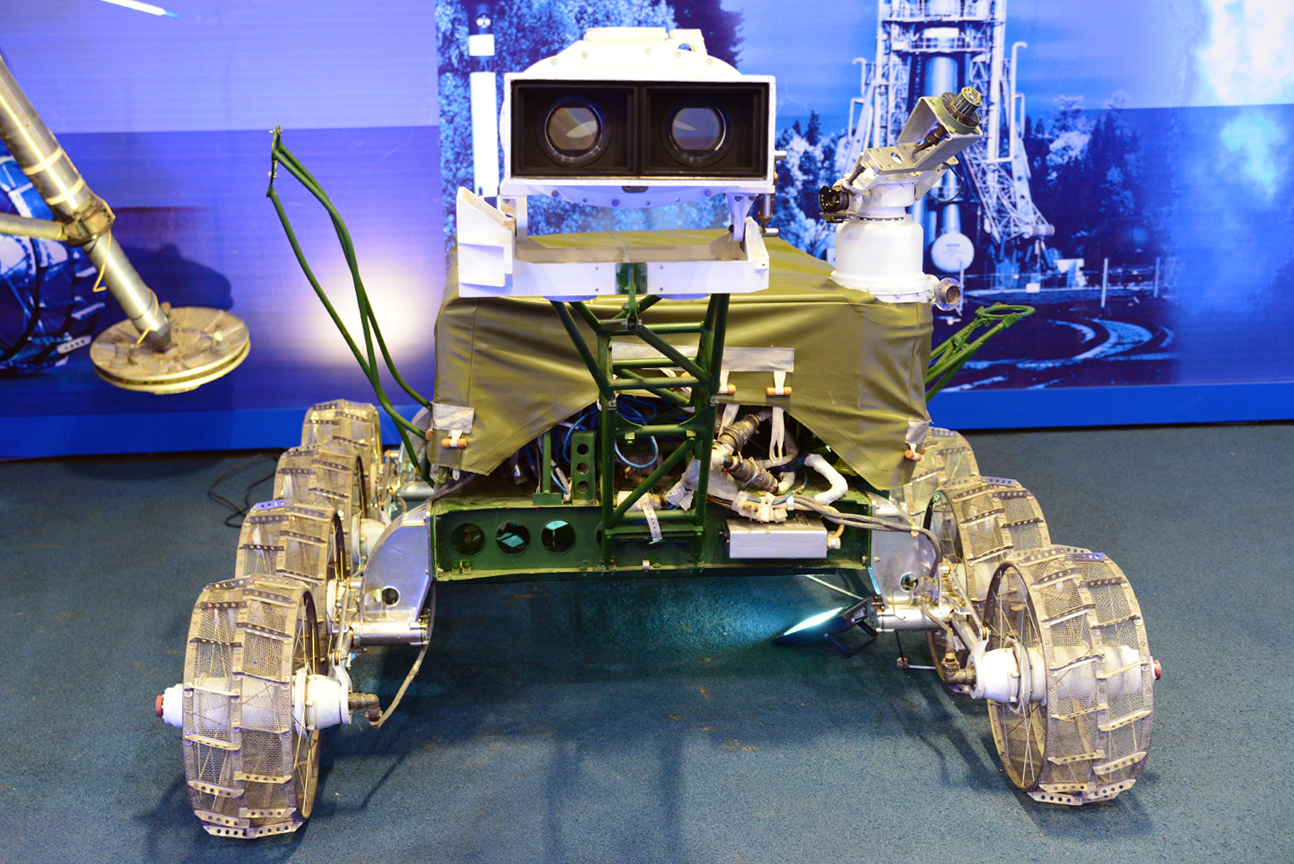
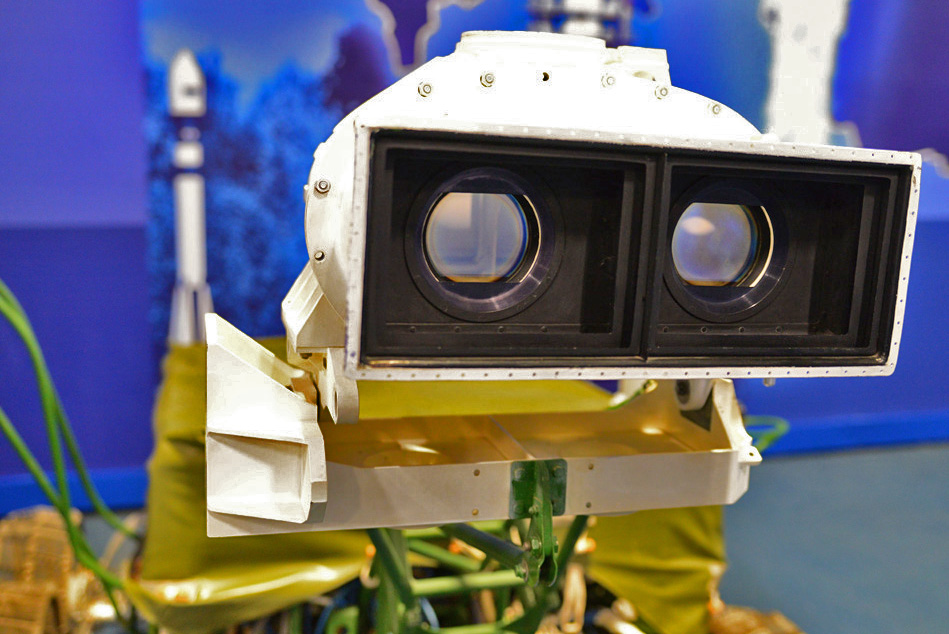
Начиная с «Лунохода-2» одна из ТВ-камер установлена на высоте глаз стоящего человека, что позволило облегчить дистанционное управление. Введено регулирование частоты кадров в диапазоне 3,2 – 21 секунда.

В рамках реализации советской лунно-посадочной пилотируемой программы Н-1-Л3 в предусматривалось использование модификации луноходов с блоком управления движением и системой безопасности. Планетоходы планировалось дооборудовать радиомаяком (для предварительного выбора места посадки) и ручным управлением (как транспорт для перемещения космонавта). «Луноходы» создавались под руководством Г. Н. Бабакина в конструкторском бюро Машиностроительного завода имени С. А. Лавочкина (Химки, Московская область). Самоходное шасси для лунохода было создано под руководством А. Л. Кемурджиана во ВНИИтрансмаш (Ленинград).
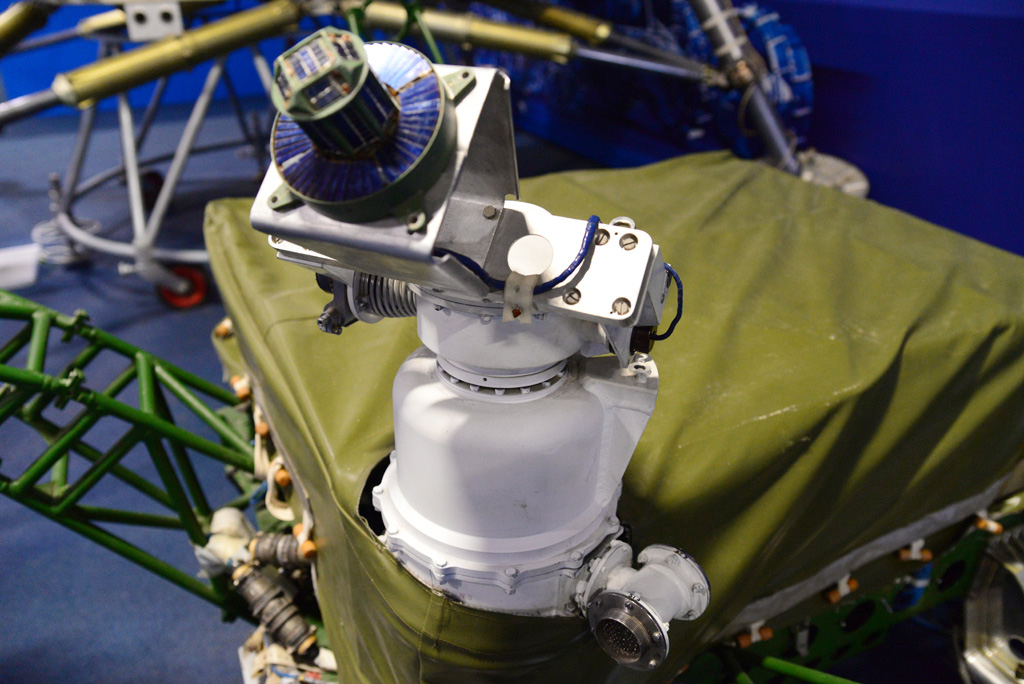
Осталось невыясненным назначение устройства появившегося на управляемой модификации «Лунохода» вместо остронаправленной антенны


Модифицированные для пилотируемых экспедиций луноходы должны были заранее детально обследовать предполагаемый район посадки лунного корабля, а также исполнять роль радиомаяков для обеспечения точности посадки пилотируемого корабля в выбранное место. Предполагалось, что перед осуществлением высадки космонавта на Луну будут отправлены два лунохода для выбора основного и запасного районов прилунения. В запасной район впоследствии должна была сесть в автоматическом режиме резервная беспилотная лунная кабина. В основном районе прилунилась бы лунная кабина с космонавтом. Основной режим посадки лунной кабины предполагался автоматическим — на радиомаяк лунохода. Если же при посадке основной лунный корабль получал повреждения, которые не позволили бы ему стартовать с Луны, то космонавт должен был воспользоваться одним из луноходов для поездки к резервной лунной кабине. Космонавт также мог использовать луноход как транспорт для себя и перемещаемого оборудования. На таком модифицированном луноходе предполагалось иметь запас кислорода, разъёмы для шлангов лунного скафандра, место космонавта в виде небольшой площадки с пультом управления в передней части аппарата.

Общий вид планетохода
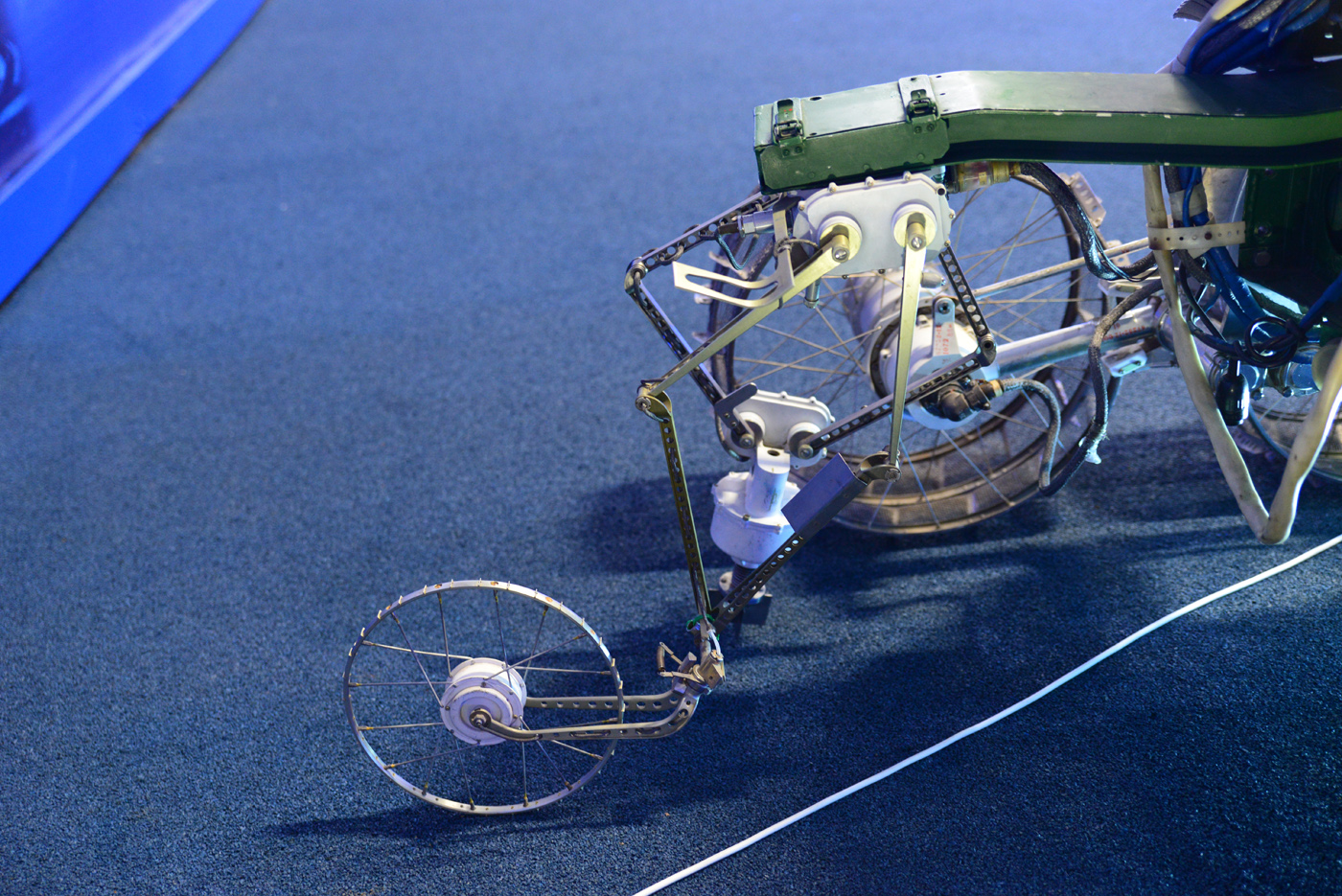
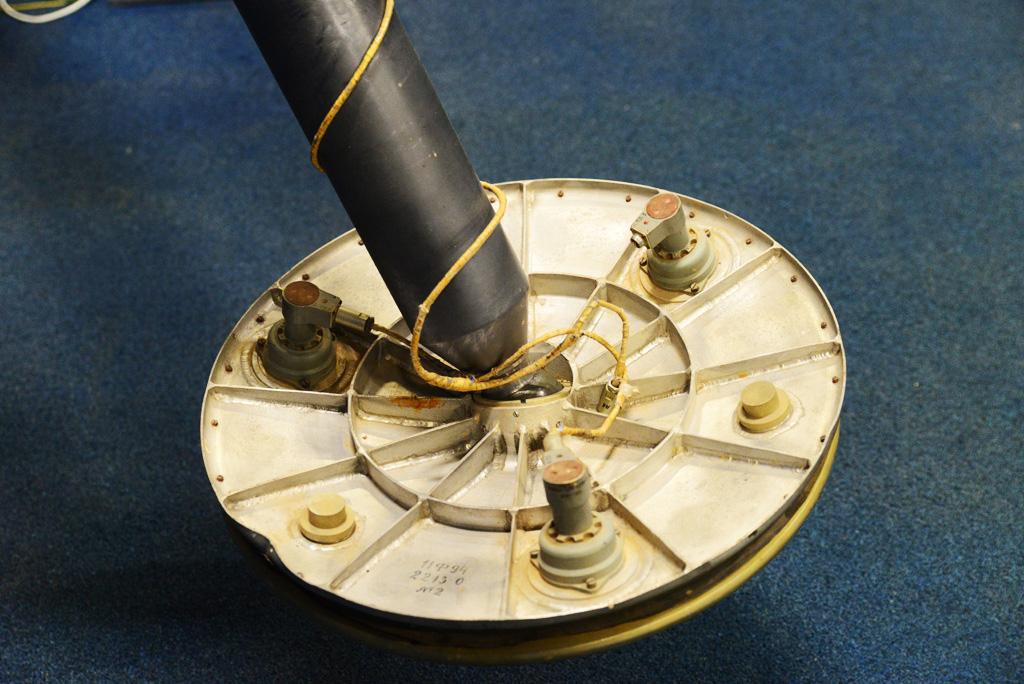
Датчик фактически пройденого пути – это свободно катящееся (девятое) колесо

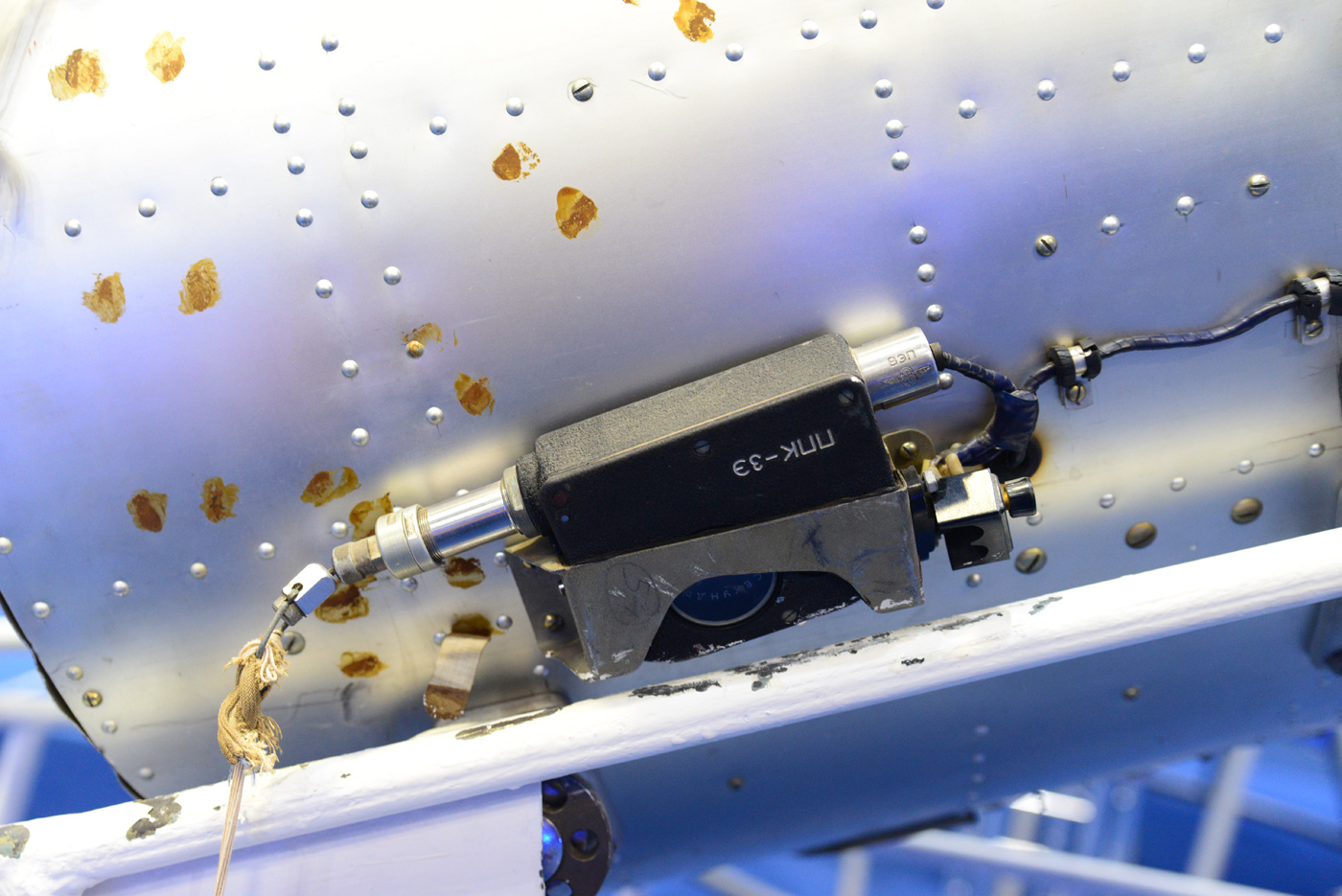
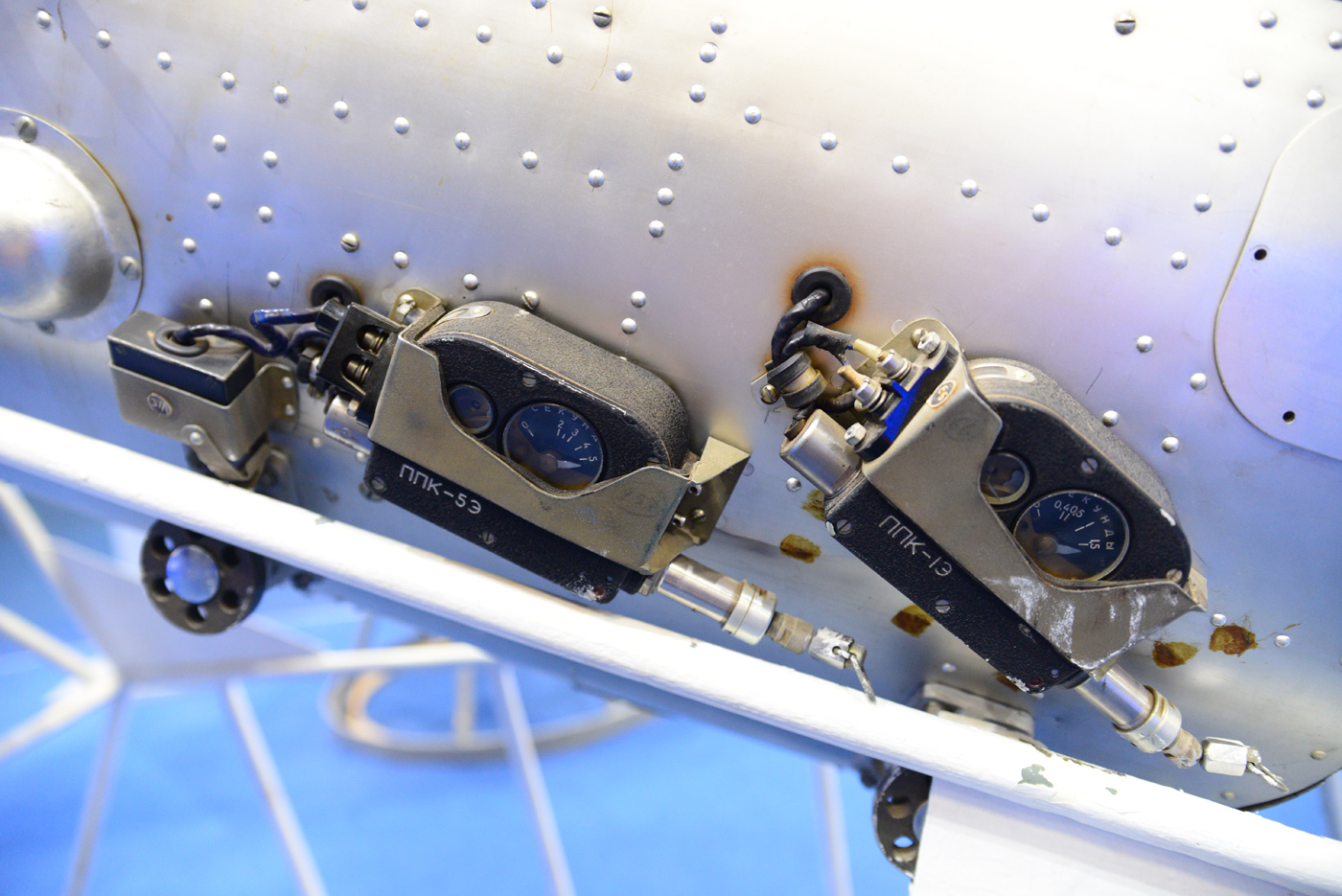
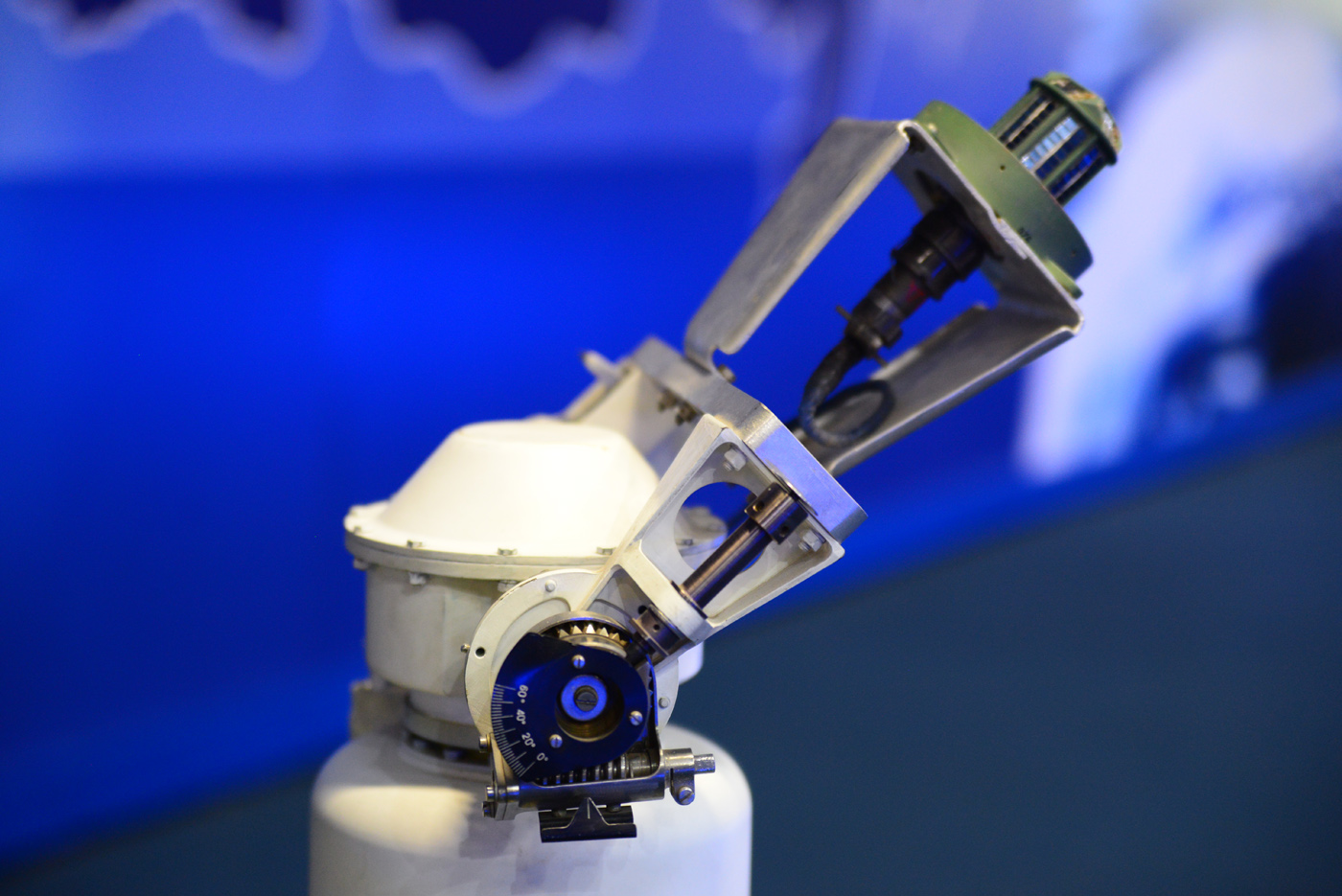
Прибор оценки проходимости
Панель управления электропитанием опытного образца «Лунохода»
"Прибор оценки проходимости состоит из верхней головки, с помощью которого крепится к корпусу планетохода, нижней головки с конусно-лопастным штампом и рычажной системы. В верхней головке расположены электромеханические приводы для перемещения нижней головки, механизм для опускания на грунт и подъёма в исходное положение девятого колеса, потенциометрический датчик вертикального перемещения штампа, датчики крутящего момента и усилия внедрения штампа. Для обеспечения автоматической работы прибора по заданной программе в верхней и нижней головках прибора установлен ряд дополнительных устройств (конечные выключатели, ограничители предельных нагрузок).
Механизм опускания обеспечивает свободное вертикальное перемещение девятого колеса при движении по неровностям поверхности и имеет датчик , регистрирующий его положение относительно верхней головки.
Измерение механических свойств грунта производится при опущенном девятом колесе, что позволяет с помощью датчика его положения определять расстояние до уровня грунта и перемещение корпуса лунохода при внедрении штампа в грунт.
В процессе работы прибора непрерывно измеряется перемещение штампа в грунт, угол поворота штампа и вращающий момент, вертикальное перемещение девятого колеса. По этим параметрам с учётом температуры, напряжения питания и телеметрии вычисляется глубина внедрения штампа в грунт.
Датчик крена и дифферента представляет собой гироскоп с тремя степенями свободы, снабженный маятниковой коррекцией, что позволяет ему сохранять вертикальное положение своей оси вращения. Обороты ведущих колёс и девятого колеса измеряются с помощью индукционных датчиков. Датчик фактически пройденого пути – это свободно катящееся (девятое) колесо. Его размеры и масса выбраны с учетом получения наименьшей пробуксовки на лунном грунте. Пройденный путь определяется по числу оборотов девятого колеса. Показания всех приборов передаются на телеметрическую бортовую систему".
Источник: Солодов А.В., "Инженерный справочник по космической технике"

Колесо образовано тремя титановыми обручами, соединёнными грунтозацепами. Крайние обручи имеют меньший диаметр, чем средний. Таким образом, на твёрдом основании обод колеса имеет точечный контакт. На мягких грунтах нагружены и периферийные поверхности. Благодаря отсутствию диска, соединяющего обод и ступицу, обеспечивается свободное перетекание грунта по внутренней поверхности обручей и сетки

Электромеханический привод

Корпус электромеханического привода посредством рычага и реактивной штанги связан с кронштейном блока колёс
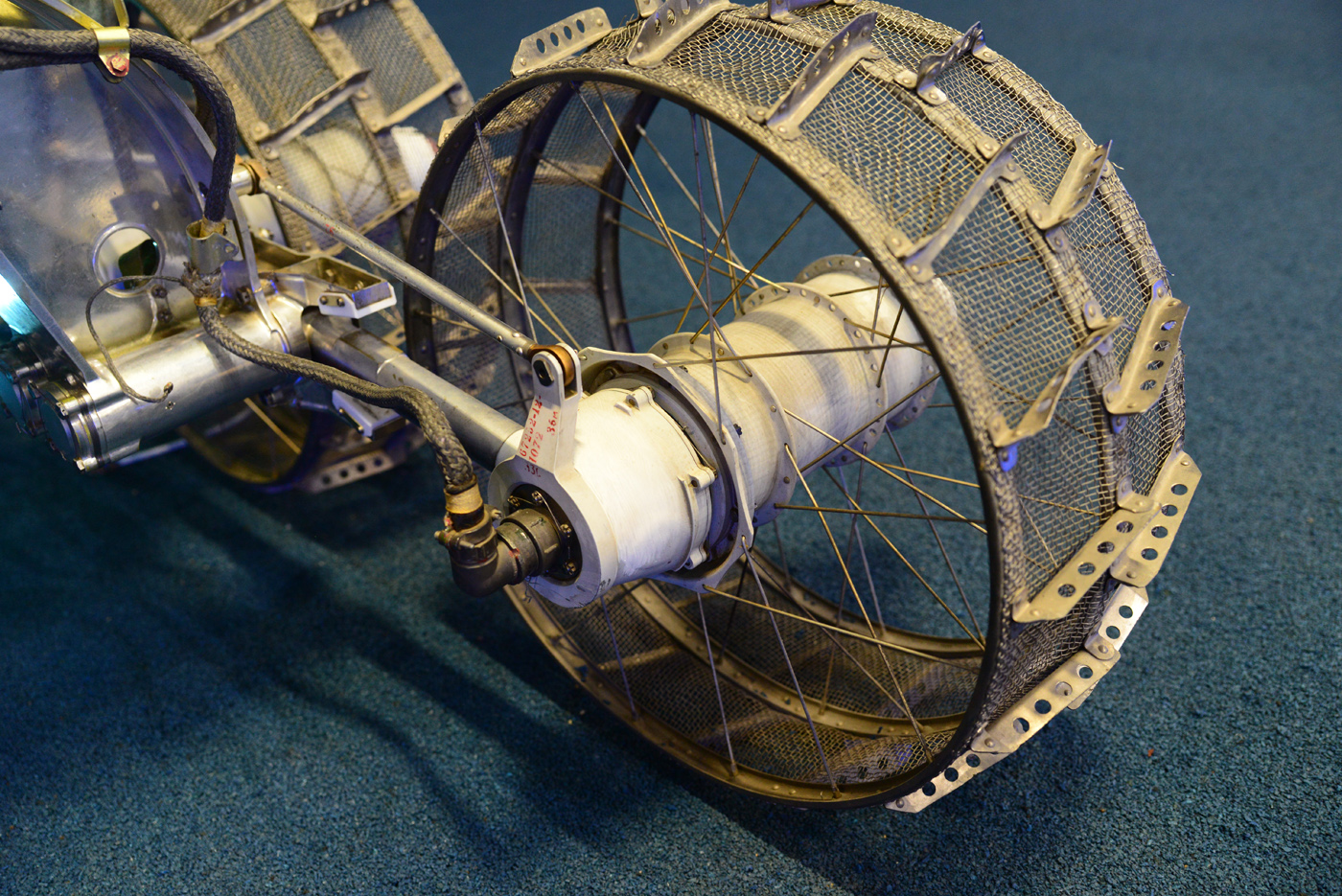
В левой части снимка хорошо виден покрытый аллюминием балансир (направляющее устройство), который обеспечивает качание колеса в продольной плоскости шасси
"Колесо состоит из трёх ободьев, каждый из которых связан со ступицей шестнадцатью спицами. Наружная поверхность ободьев обшита металлической сеткой и скреплена грунтозацепами. Ступица колеса установлена на двух шарикоподшипниках на корпусе электромеханического привода, который в свою очередь крепится на подшипниках в нижней головке балансира. Подвеска шасси – индивидуальная. Направляющее устройство (балансир) обеспечивает качание колеса в продольной плоскости шасси. В качестве упругих элементов применены торсионы. Энергоёмкость подвесок крайних колёс обеспечивает преодоление уступов высотой 400 мм без удара в вехний ограничитель хода колёс (упор). Динамический ход всех колёс 100 мм. Демпфирование энергии колебаний при движении лунохода происходит в основном за счёт фрикционных потерь в шарнирах и потерь на перемещение колёс по грунту.
Корпус электромеханического привода посредством рычага и реактивной штанги связан с кронштейном блока колёс. Эта связь разгружает упругие элементы подвески от воздействия реактивного момента привода. Поверхность кронштейна и элементов направляющего устройства для уменьшения отвода тепла покрыта слоем аллюминия, нанесённого методом ваккумной металлизации.
Электромеханический привод состоит из тягового электродвигателя, редуктора, механического тормоза с электромагнитным управлением, датчика температуры, датчика оборота колеса, электроразъёма и кабельной сети. В электромеханическом приводе применён электродвигатель постоянного тока.
Этот тип двигателя характеризуется простотой и надёжностью конструкции, малым весом на единицу мощности и компактностью, а также максимальным КПД. Для возможности работы двигателя в условиях вакуума щетки его изготовлены из специального материала".
Источник: Виноградов А.П., "Передвижная лаборатория на Луне «Луноход-1» (Том 1)"
Источники:
Кемурджиан, Громов, "Планетоходы"
Солодов А.В., "Инженерный справочник по космической технике"
Виноградов А.П., "Передвижная лаборатория на Луне «Луноход-1». Том 1"
Барсуков В.Л., "Передвижная лаборатория на Луне «Луноход-1». Том 2"
Дополнительно:
Ходовой макет лунохода с иммитацией моментов инерции масс в Техническом музее, г.Тольятти
Шасси лунохода в Техническом музее, г.Тольятти
Макет первого лунохода, доставленного на Луну. Музей космонавтики, г.Москва
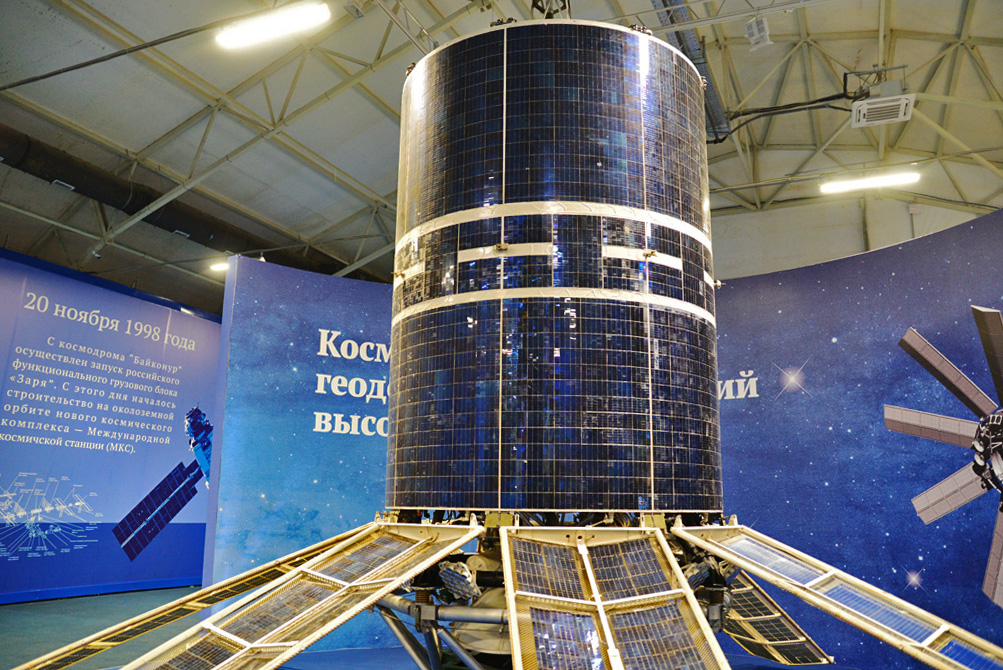
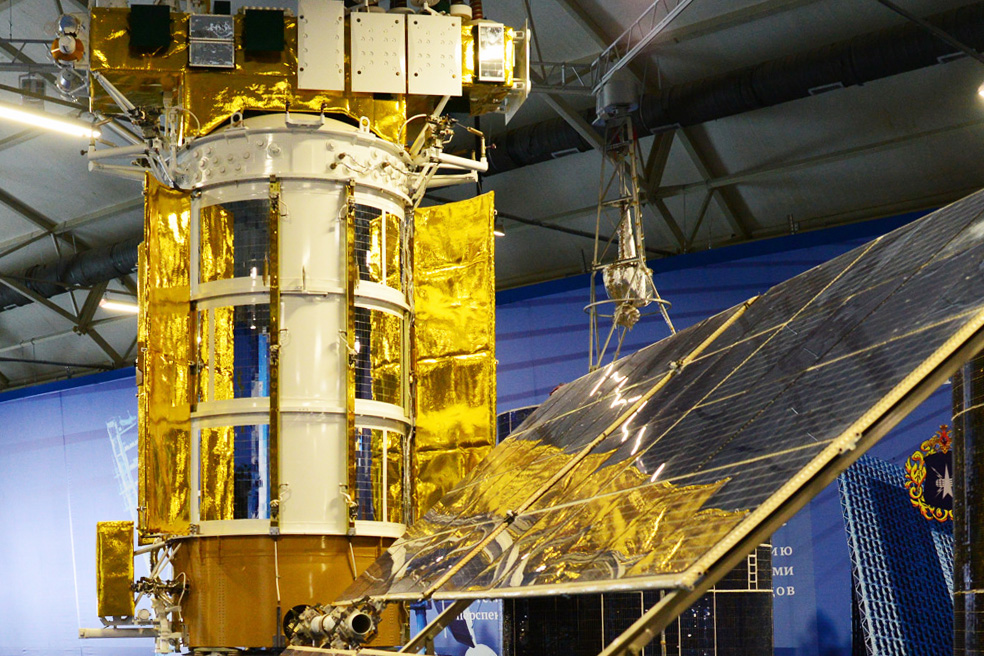
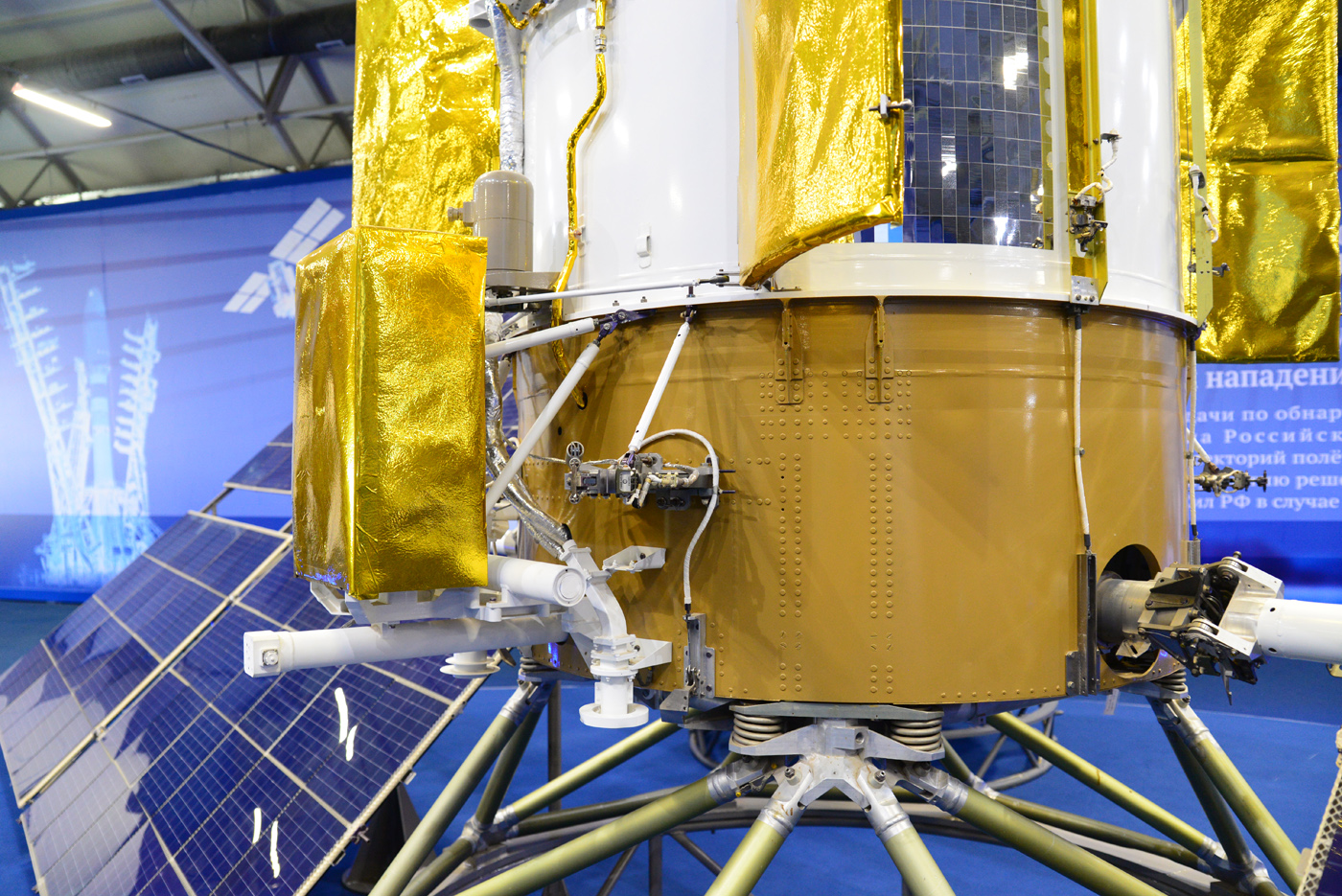
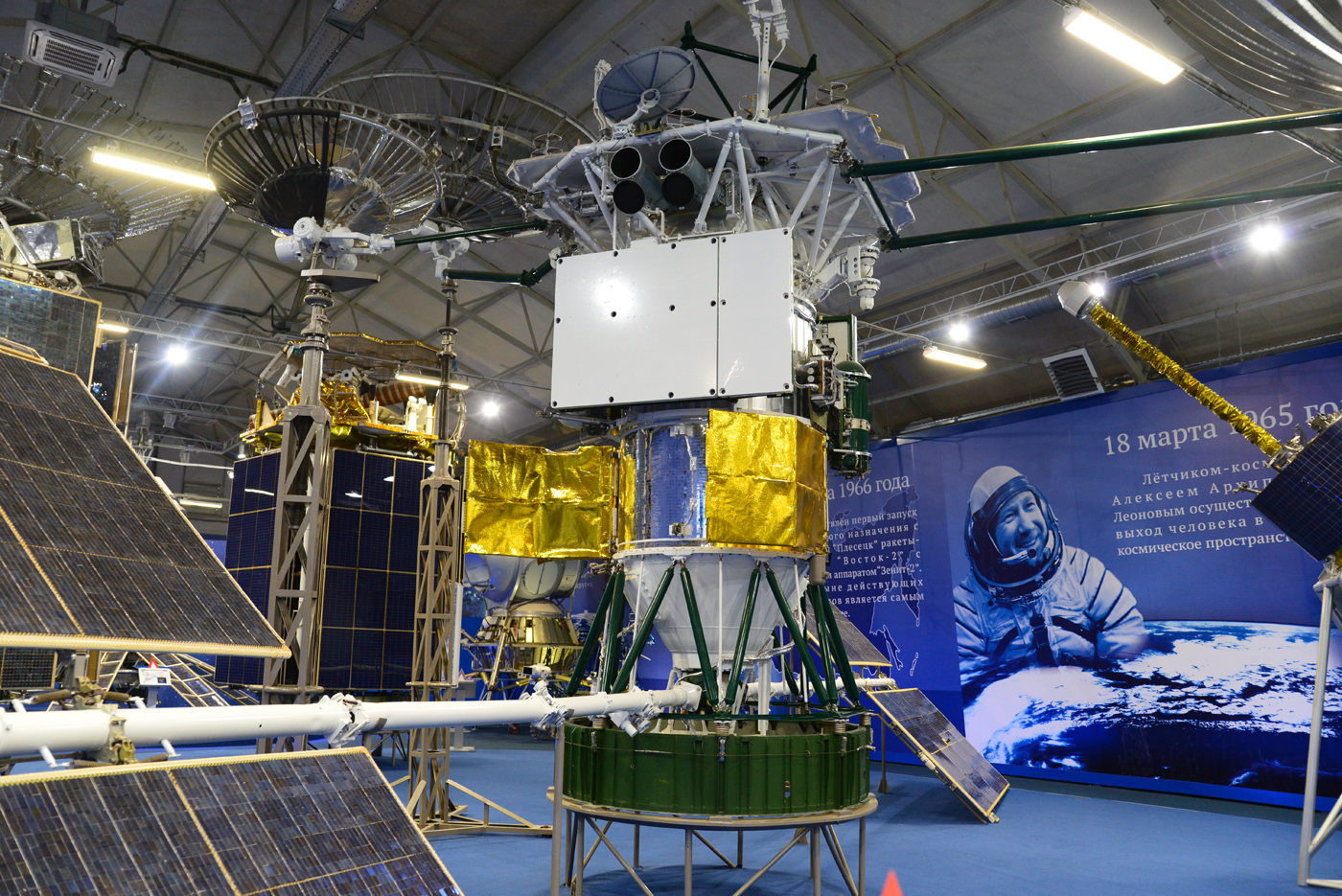
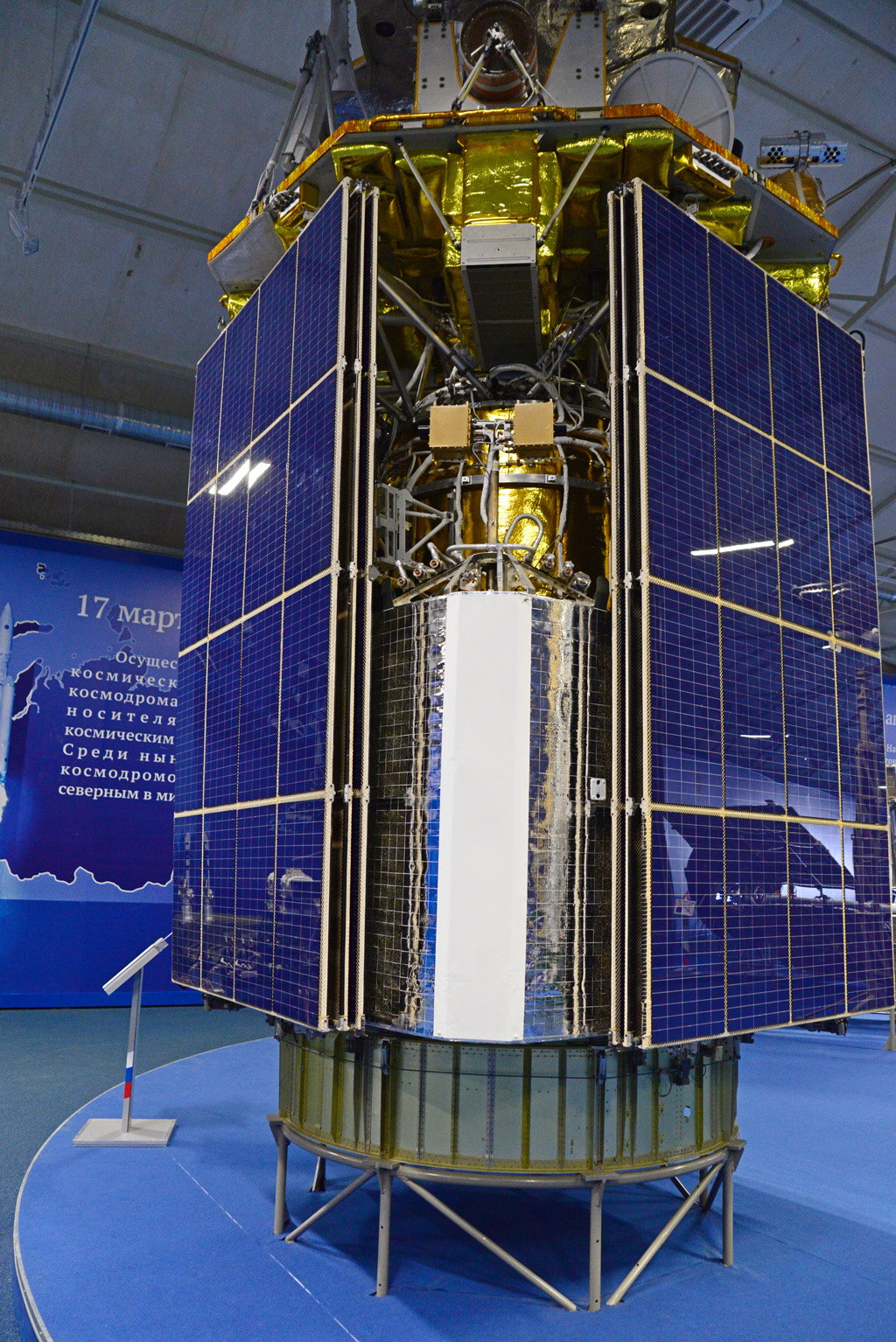
Геодезический спутник «Гео-ИК», 11Ф666
Геодезические спутники «Гео-ИК» разработаны и изготавливаются в Научно-производственном объединении прикладной механики, Красноярск-26 (г. Железногорск). Это серия аппаратов для точного определения формы Земли и конфигурации ее гравитационного поля. Получаемые данные важны для научных целей и составления точных топографических карт, они же используются в военных целях для наведения межконтинентальных баллистических ракет.
С названием этих космических аппаратов наблюдается некоторая путаница. В открытых источниках программу разработки космической геодезической системы называют «Муссон», а космические аппараты 11Ф666 называют «Гео-ИК» или «Эридан». Однако на сайте изготовителя (ОАО «ИСС» имени академика М. Ф. Решетнёва) спутники всё-таки именуются «Гео-ИК».
Первая попытка запуска «Гео-ИК» в январе 1981 года оказалась неудачной – в результате аварии на участке выведения спутник на орбиту не вышел и сгорел в плотных слоях атмосферы вместе с ракетой-носителем. Всего было запущено 13 таких космических аппаратов, последний из которых проработал до февраля 1999 года. Результатами их работы стали геодезические модели Земли ПЗ 86 и ПЗ 90, а также ввод в действие системы координат СК-95 – мировой астрономо-геодезической сети с погрешностью определения места до нескольких метров.

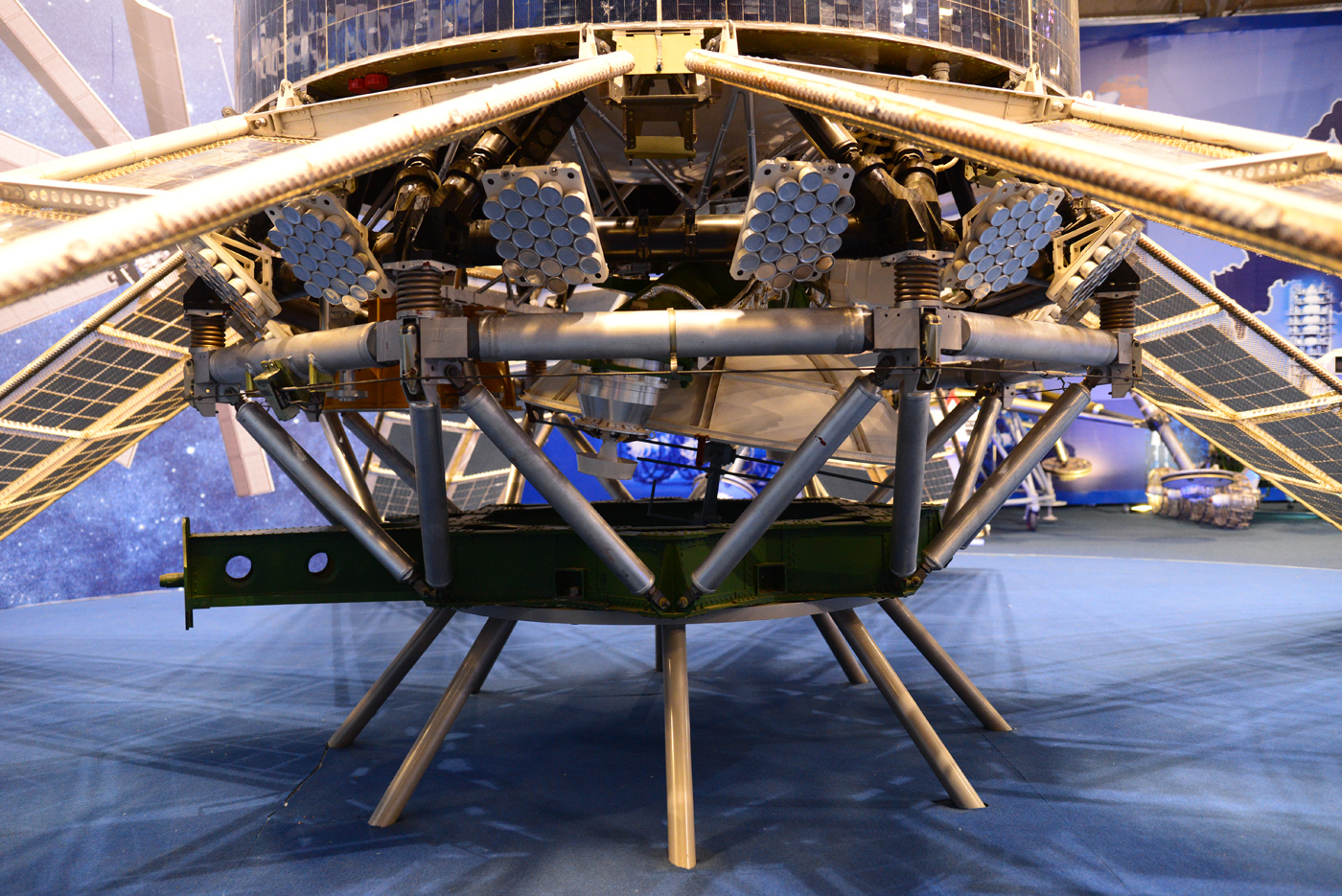
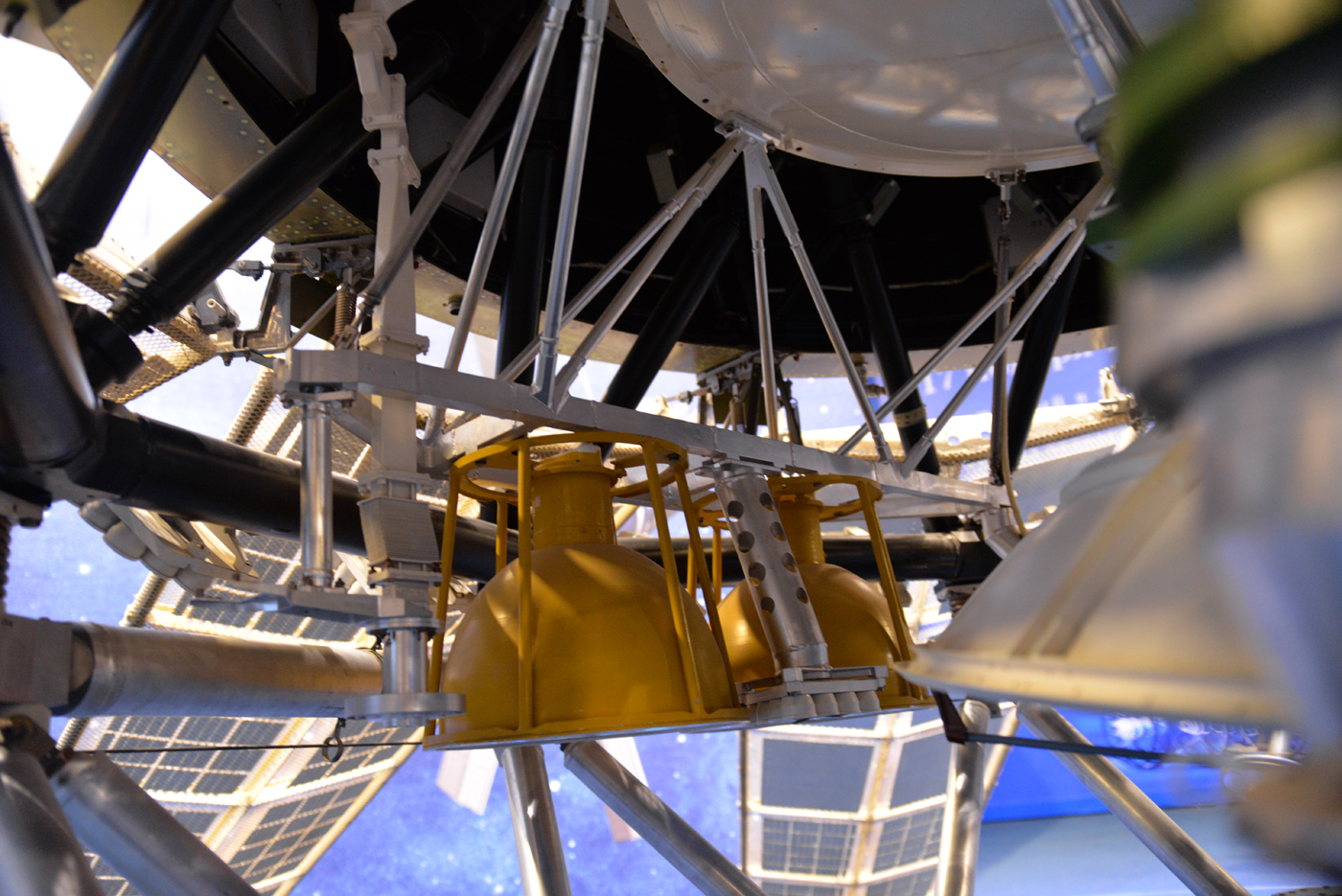
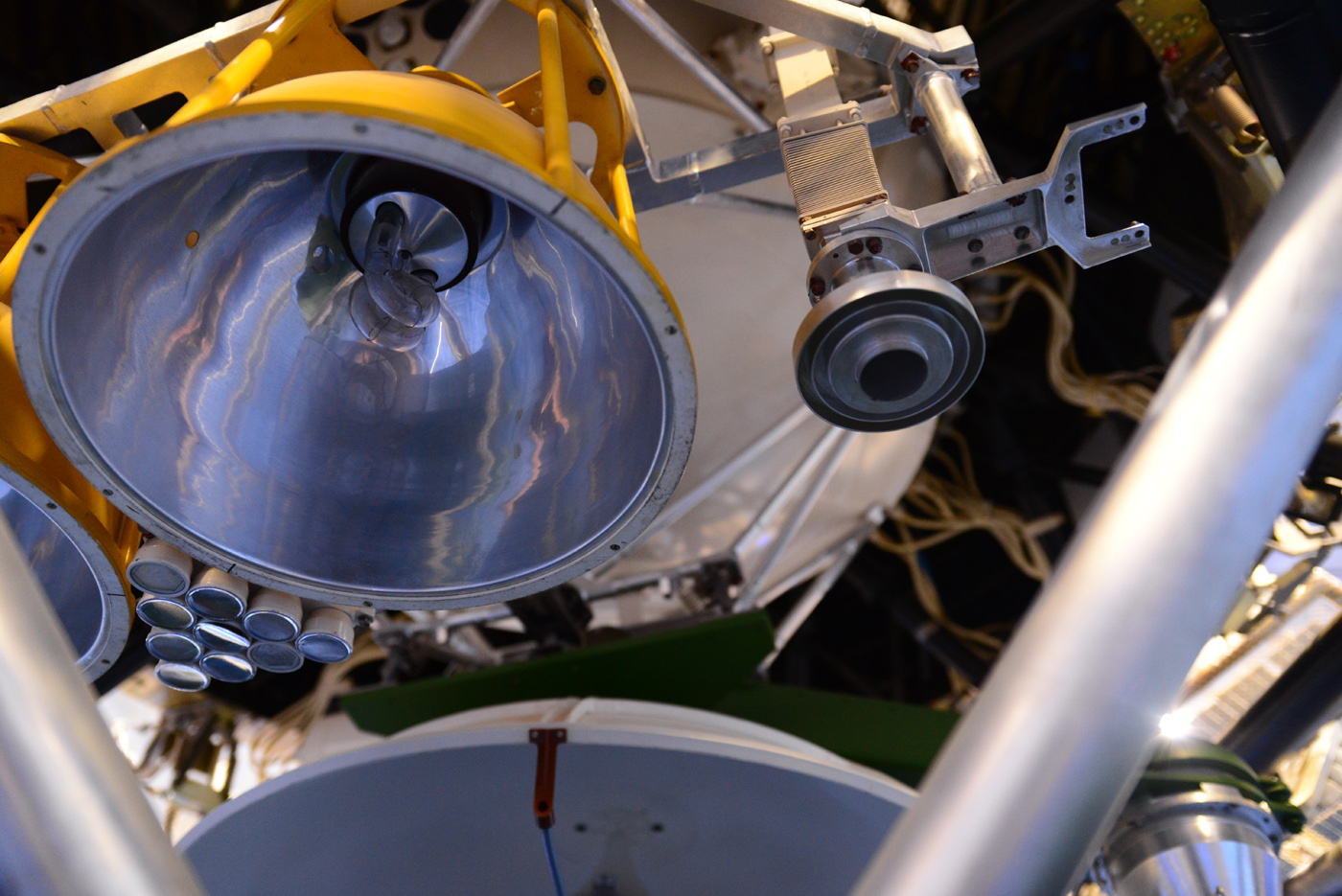
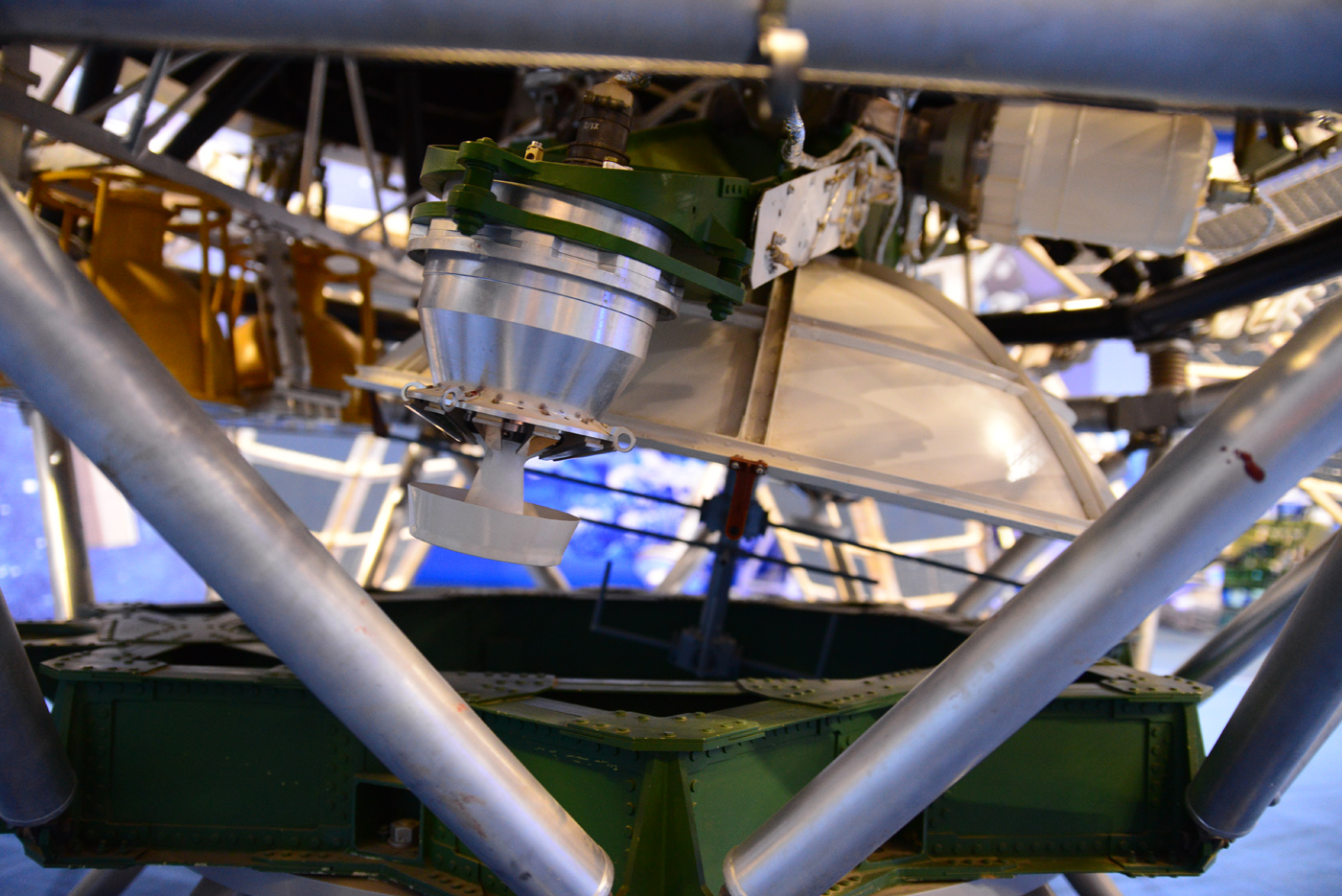
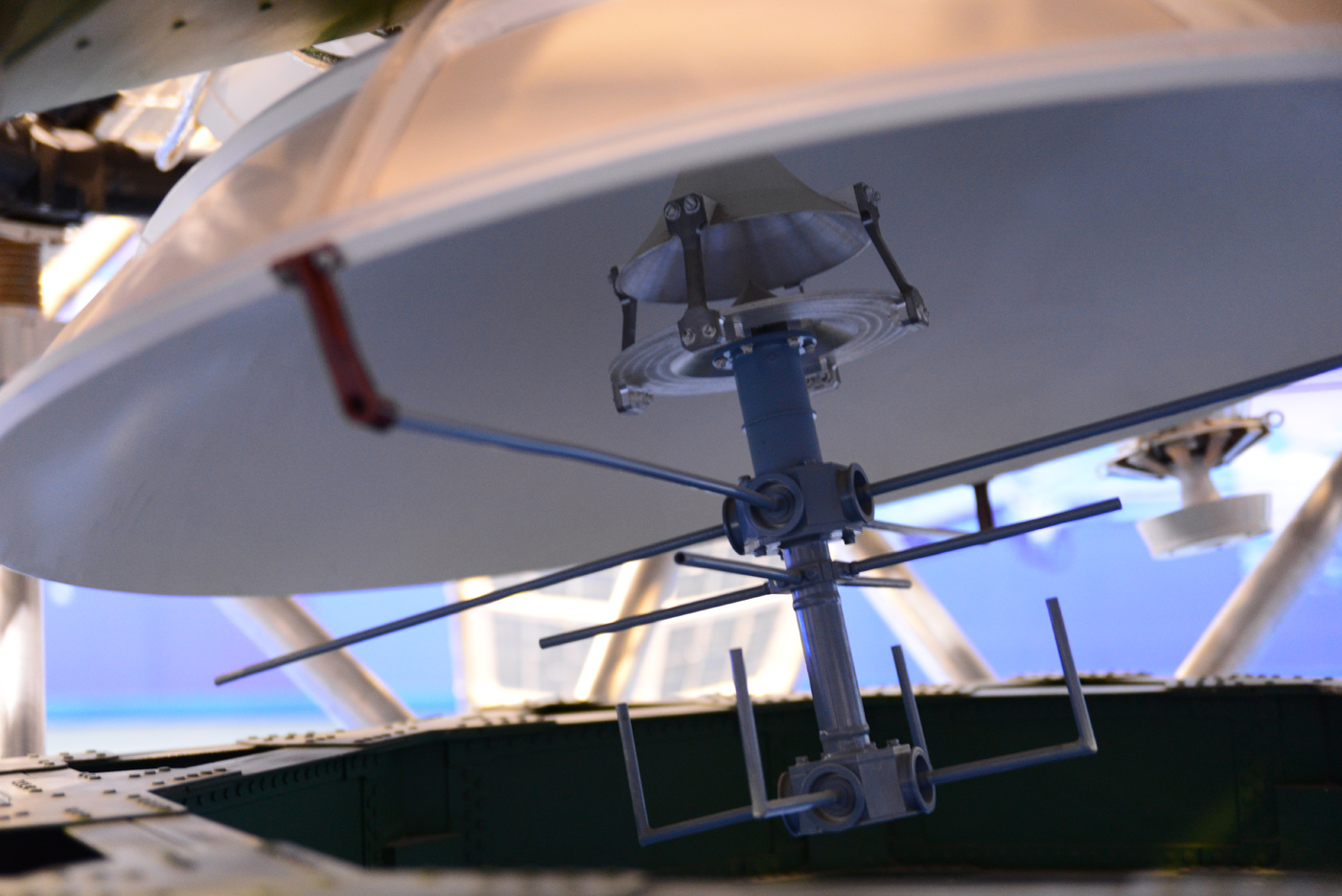
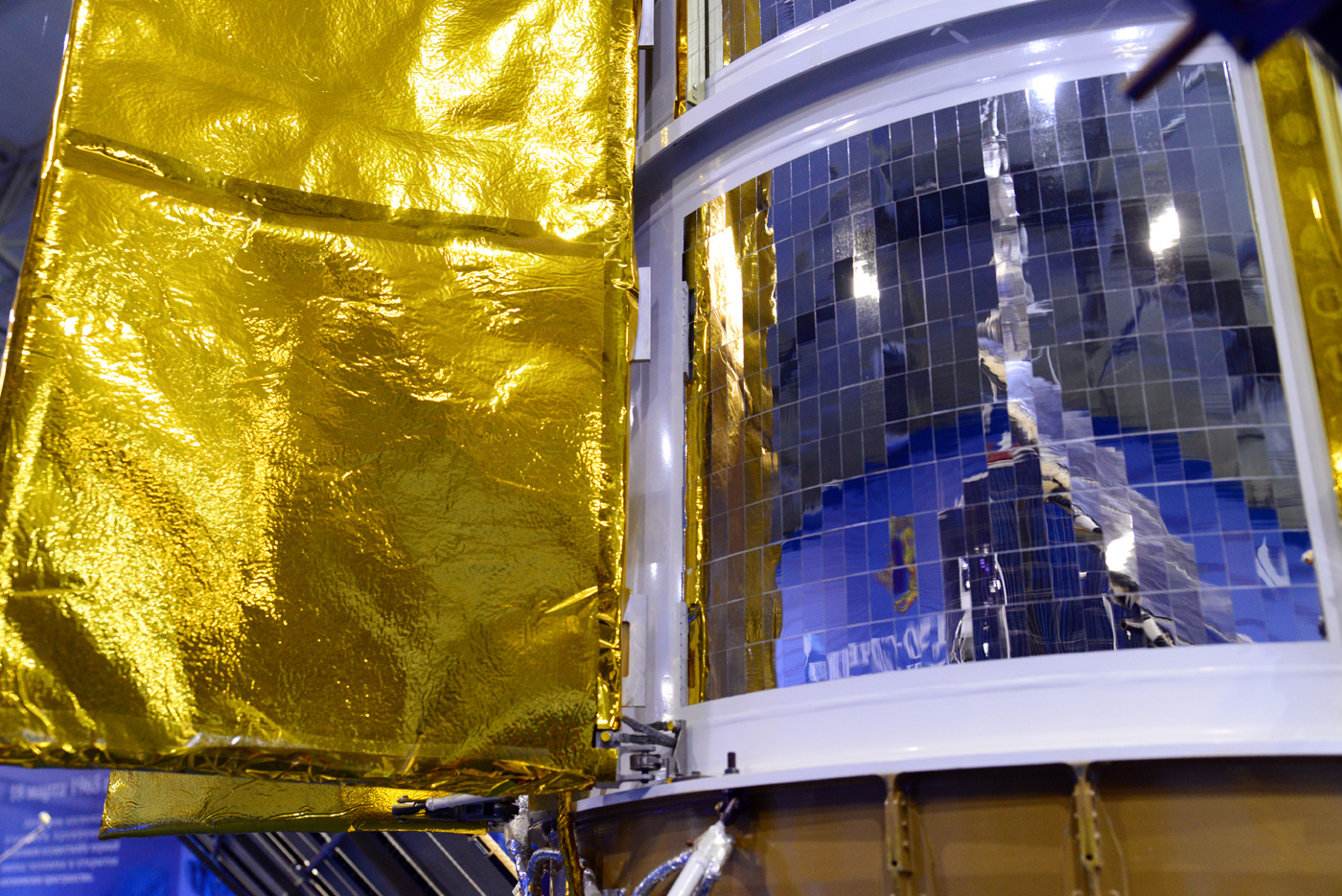
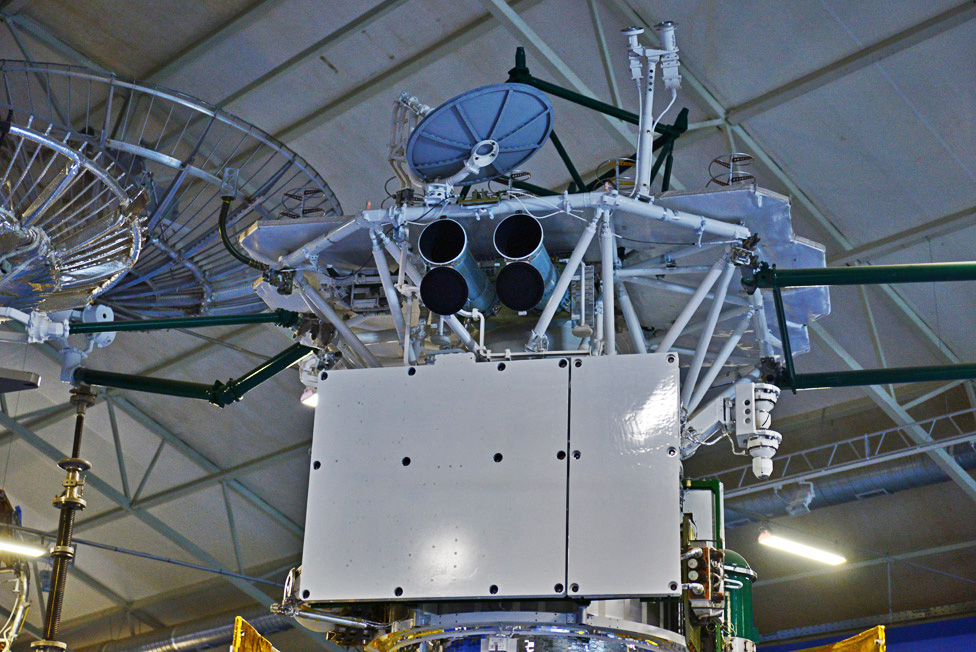
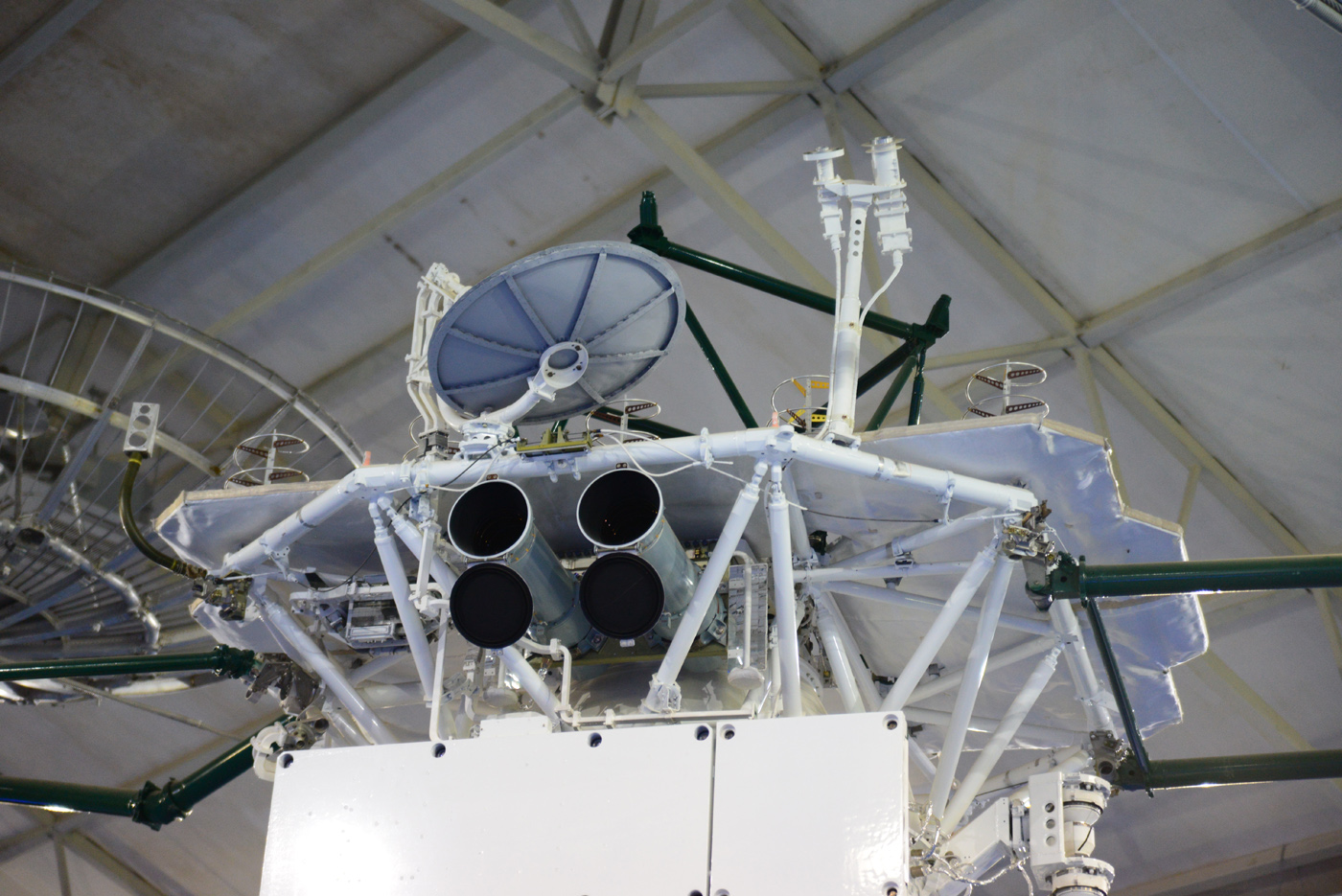
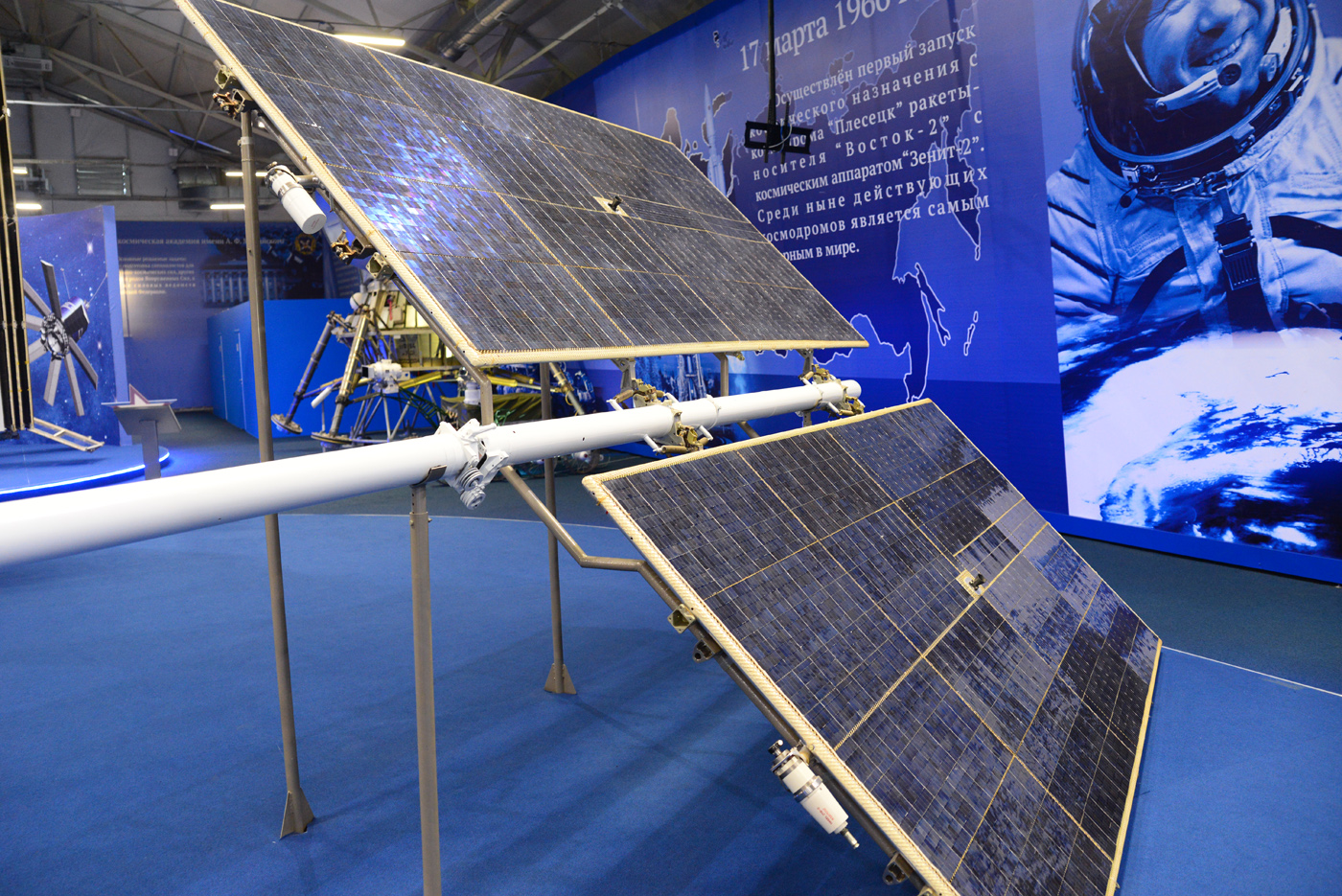
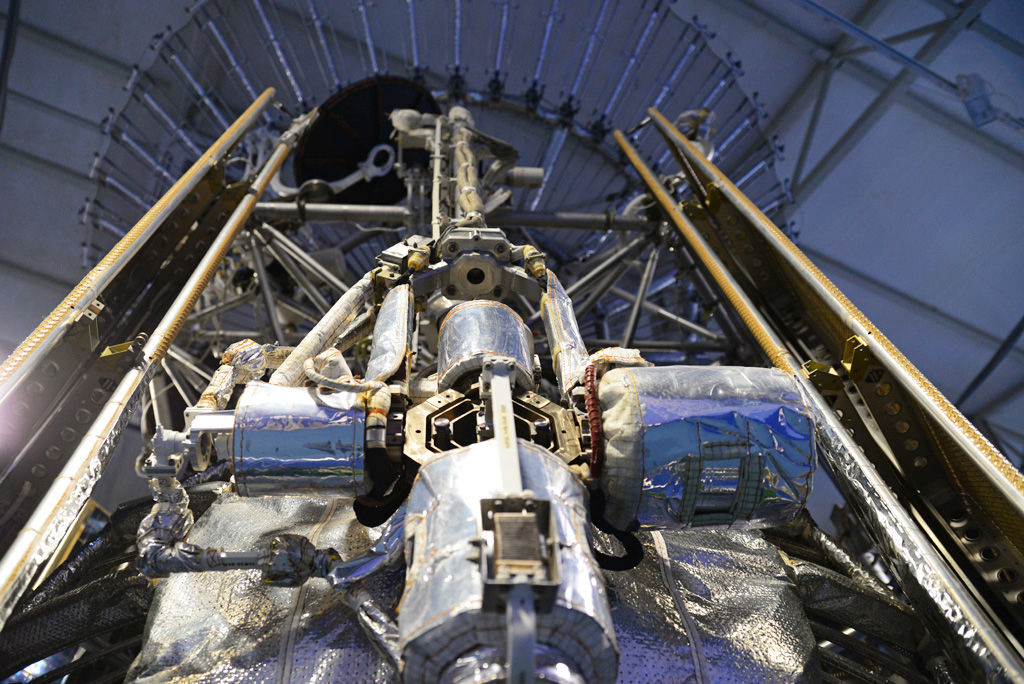
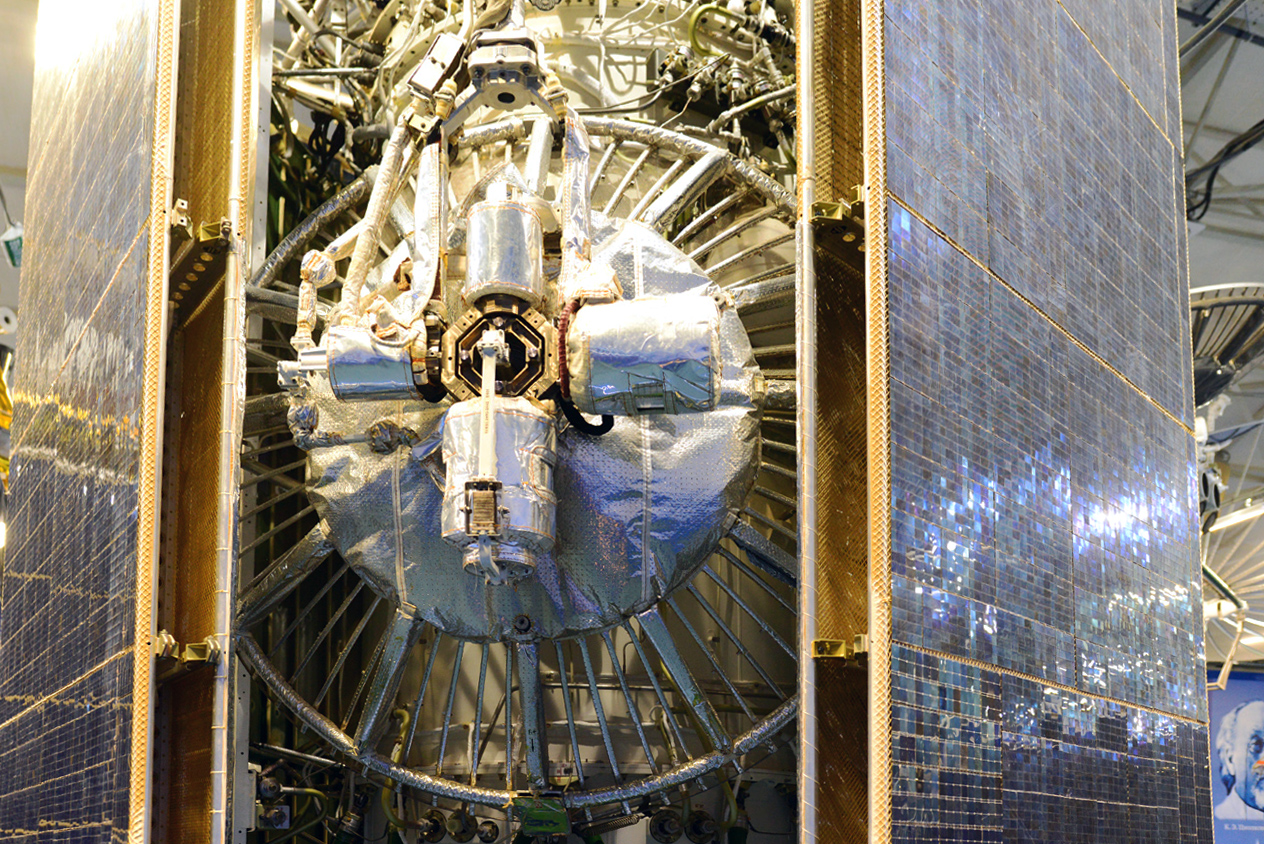
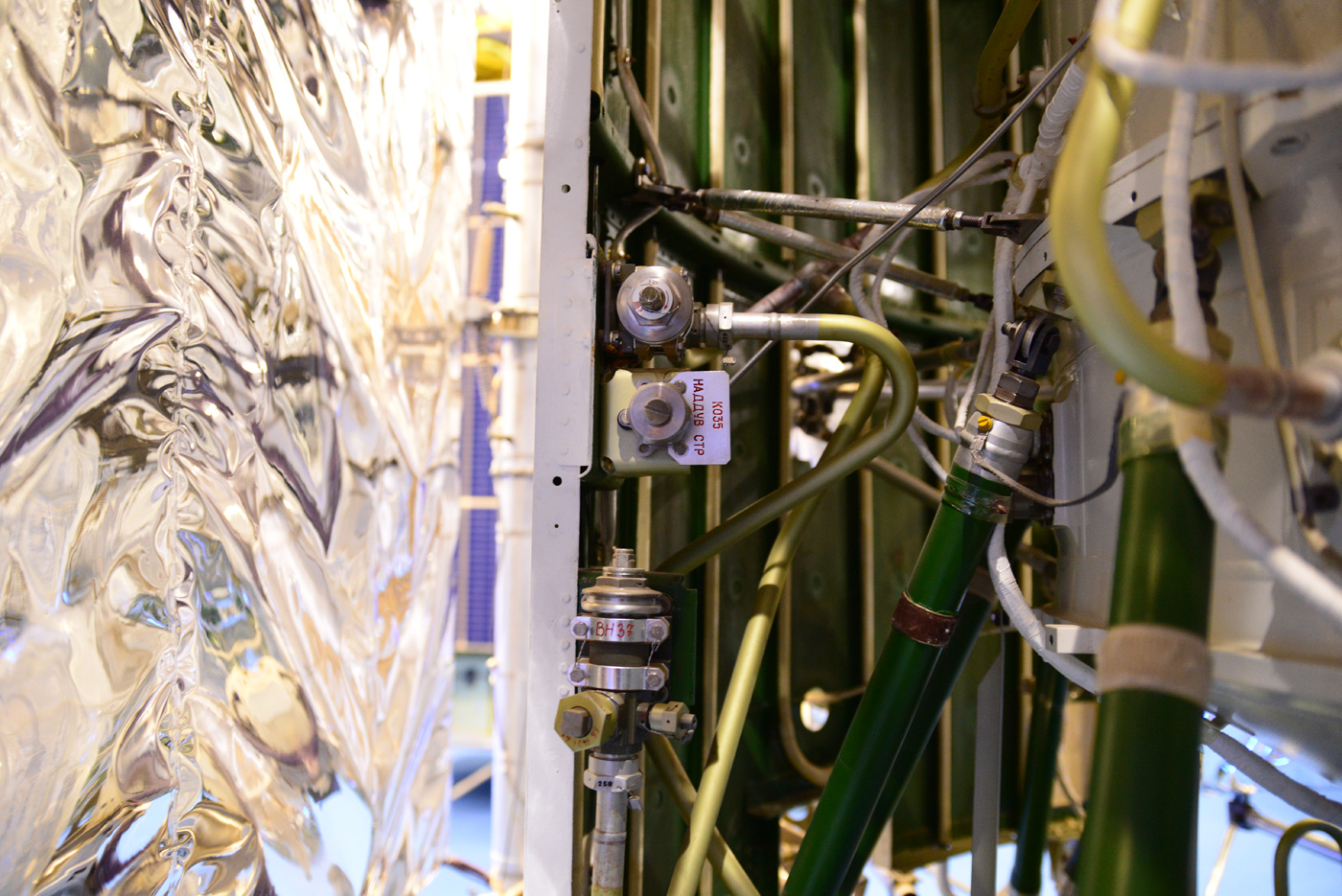
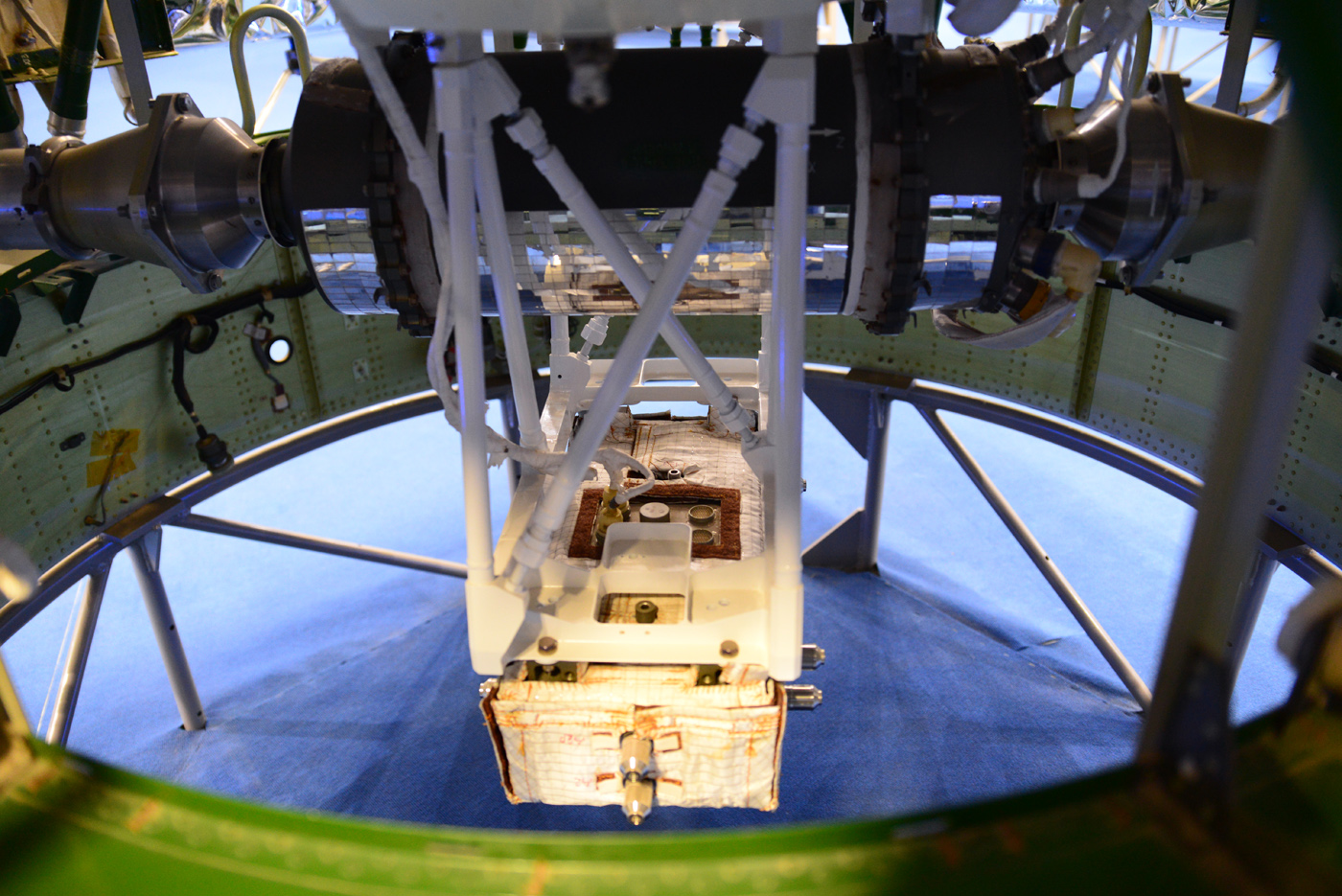
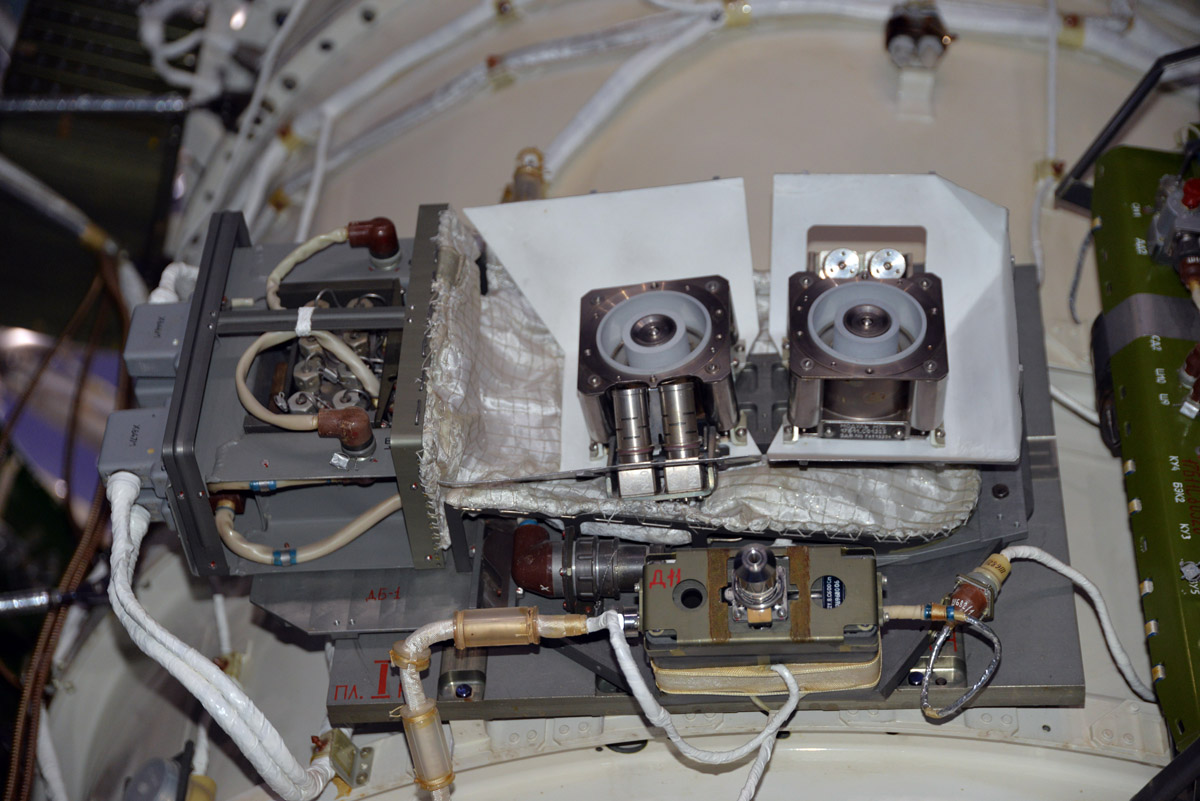
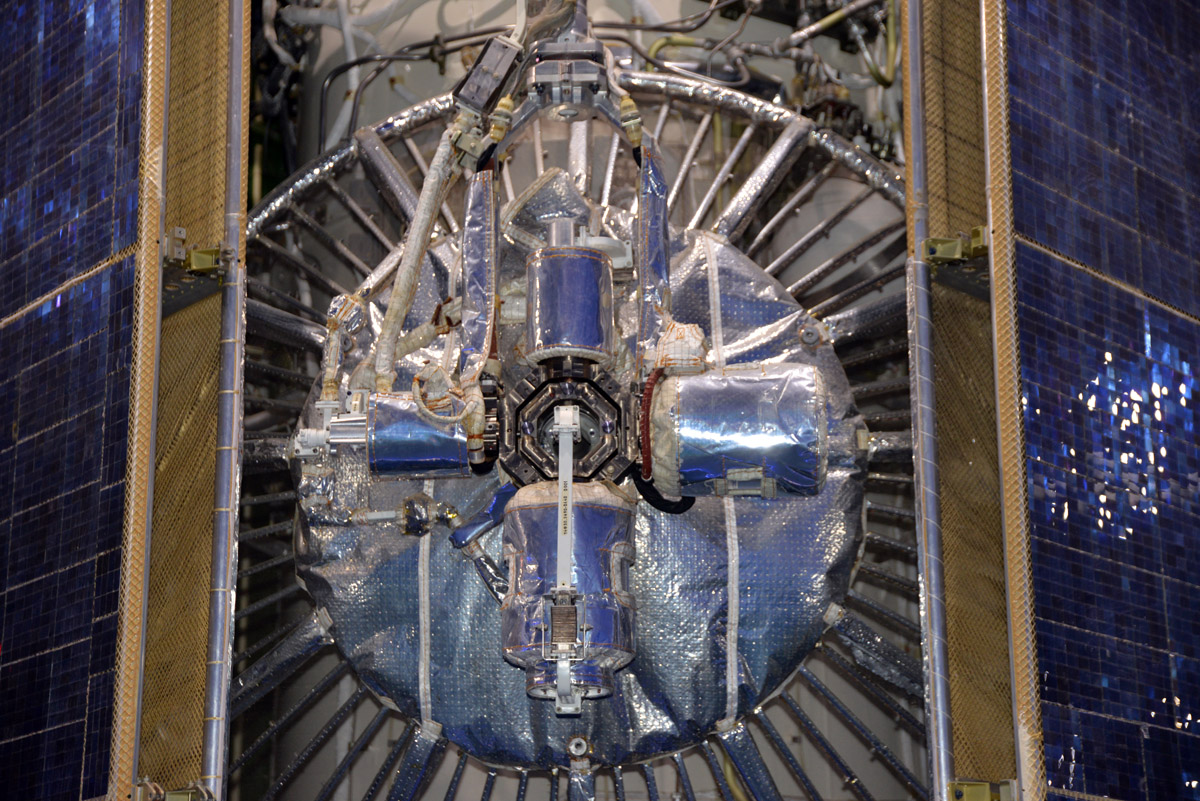
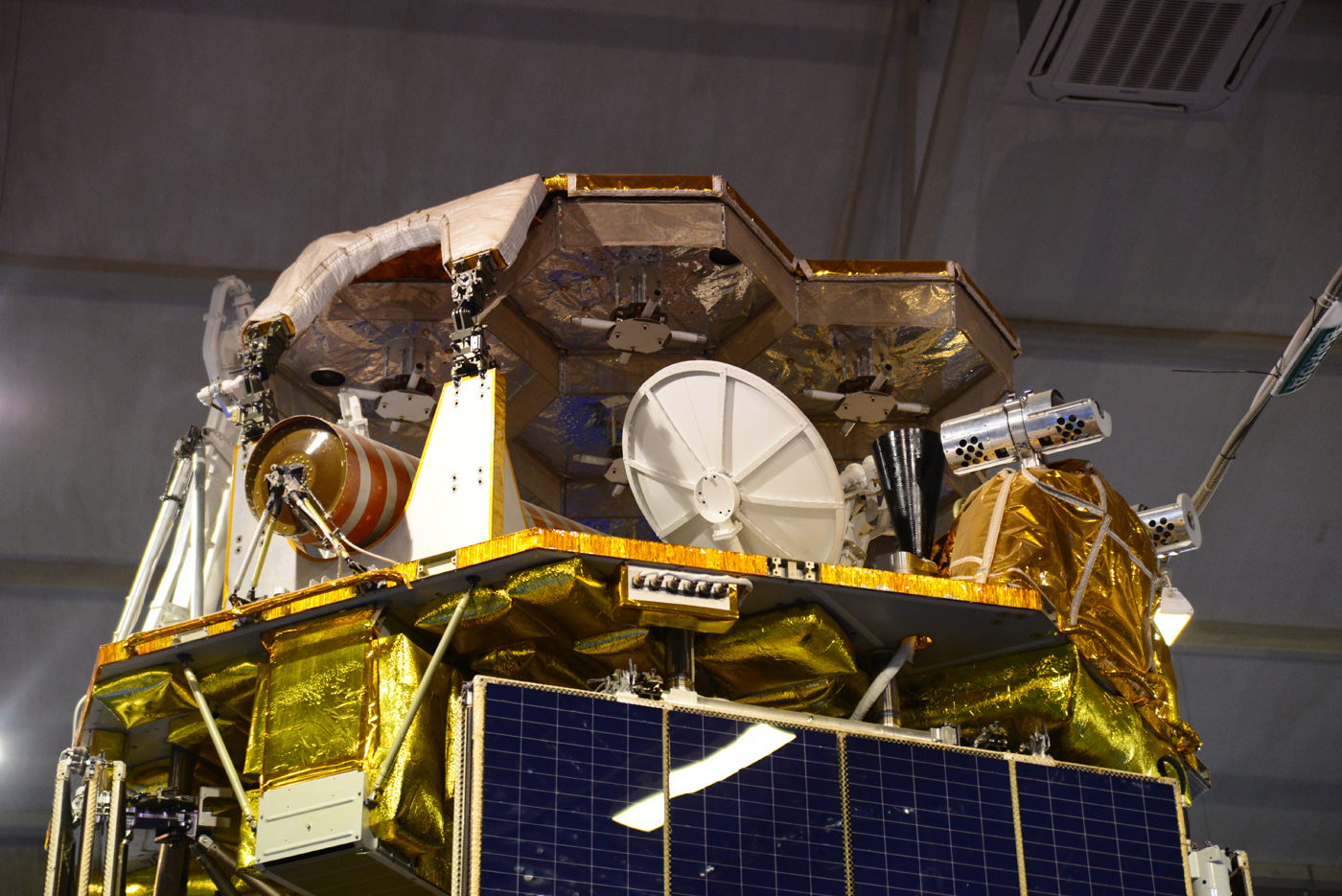
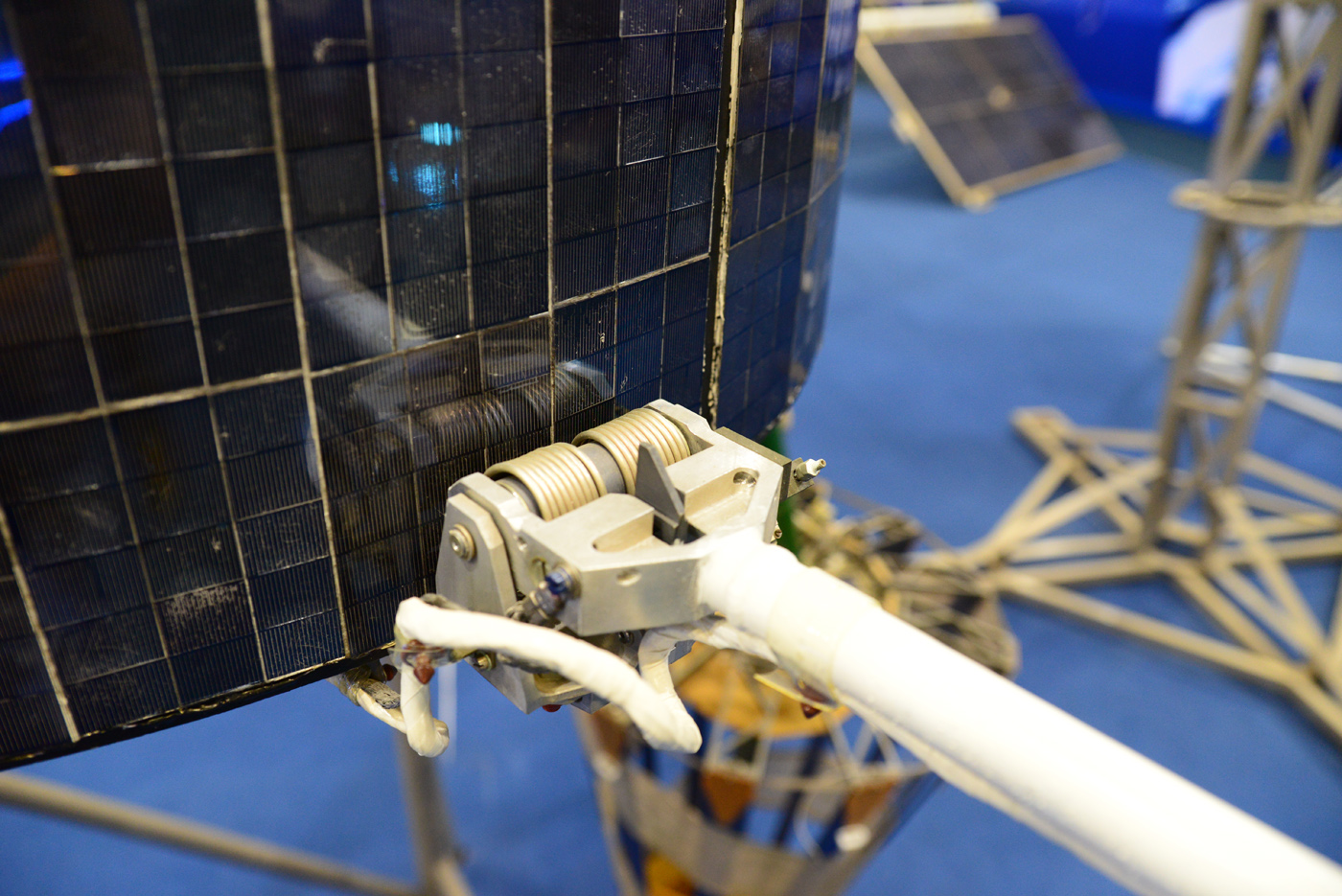
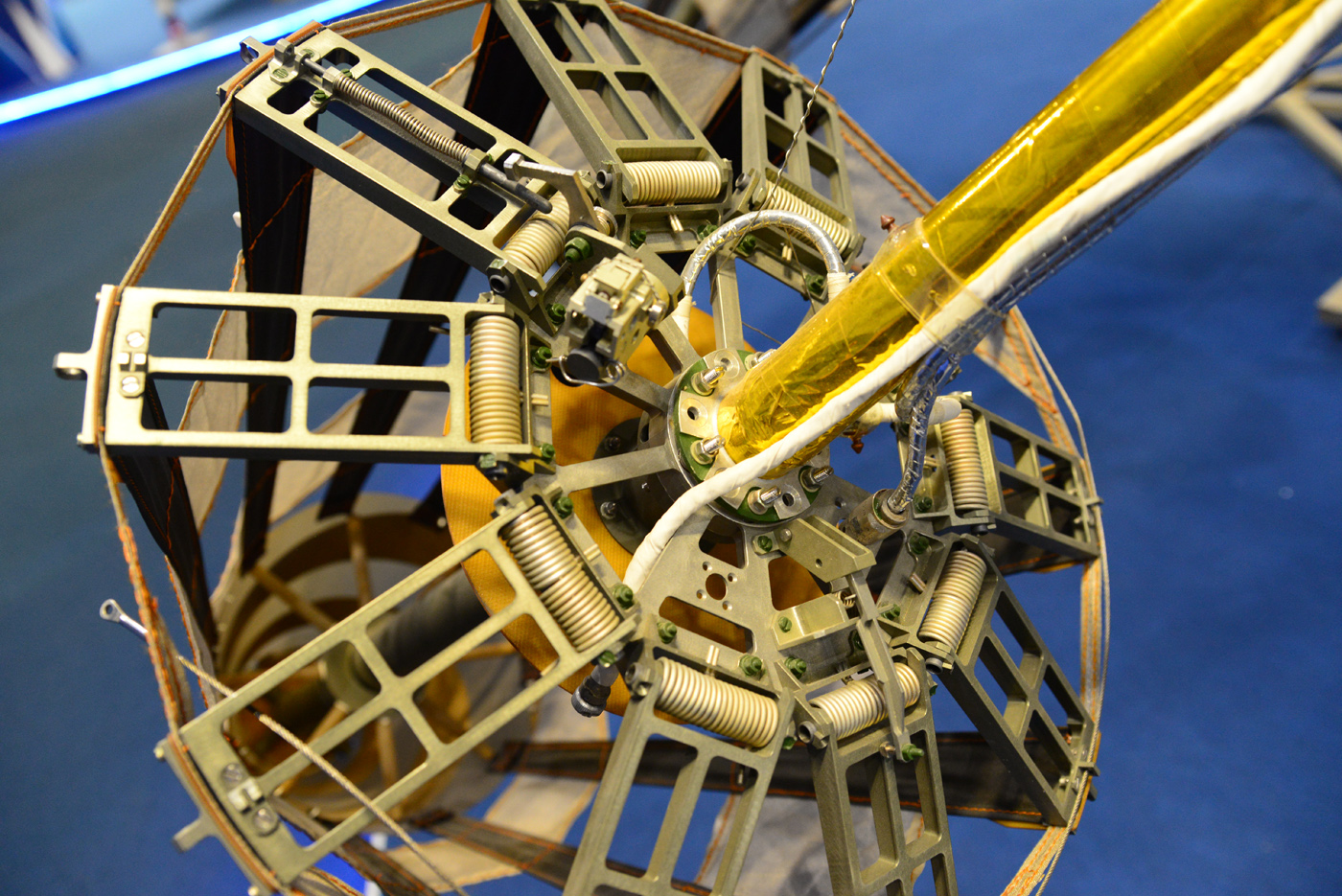
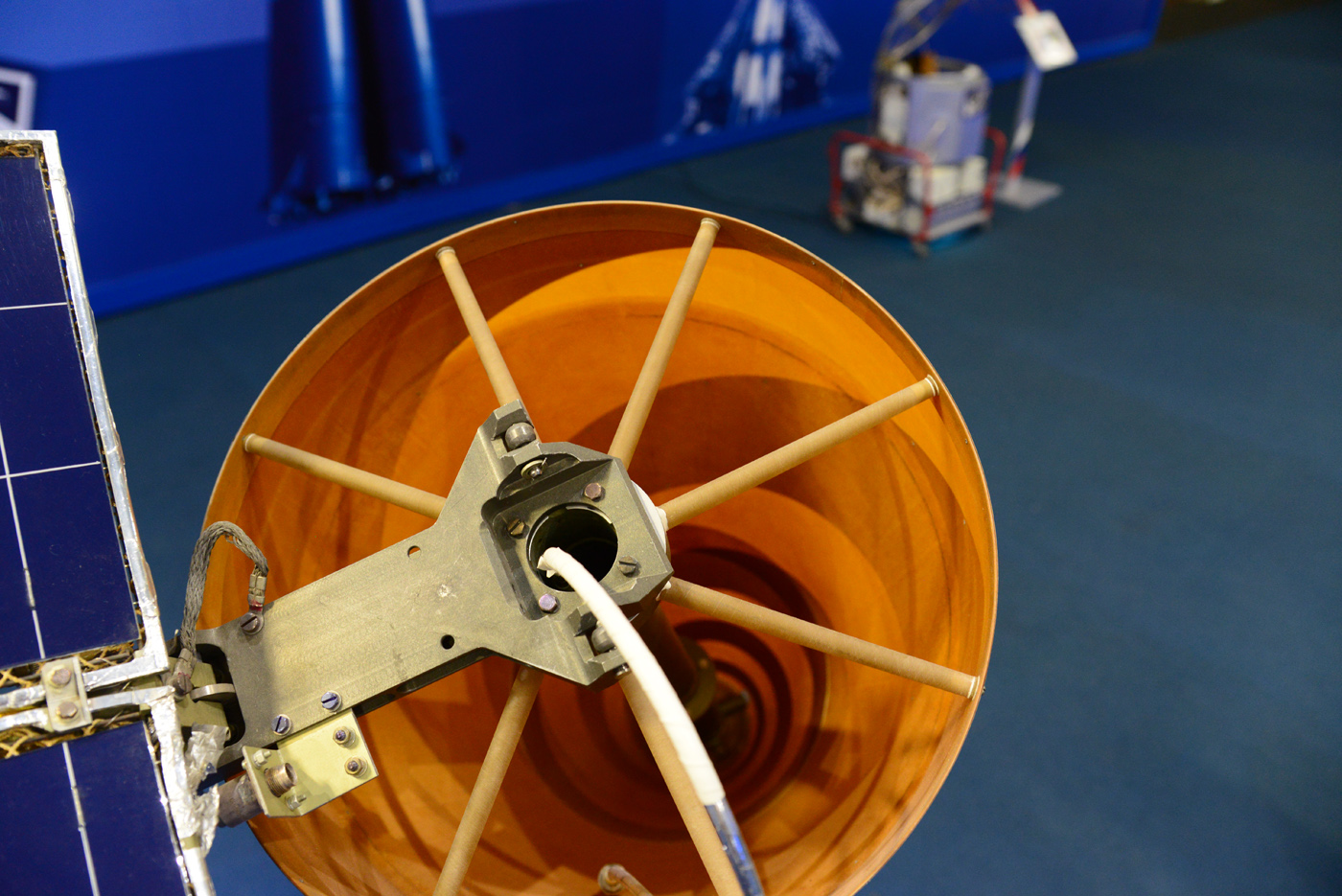
На «Гео-ИК» впервые установлена комбинированная система ориентации. Спутник пассивно ориентируется гравитационным полем. Маховик на газовом подвесе обеспечивает получение трёхосной ориентации, а антенная платформа, установленная в кардане автономно, с точностью до полуградуса ориентируется на центр Земли
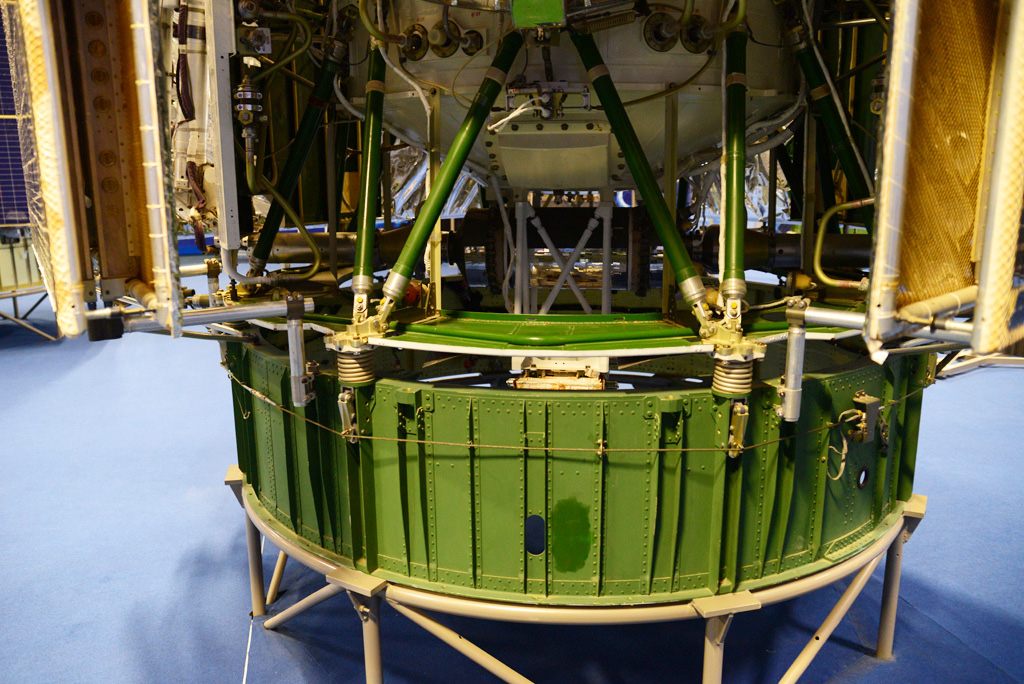
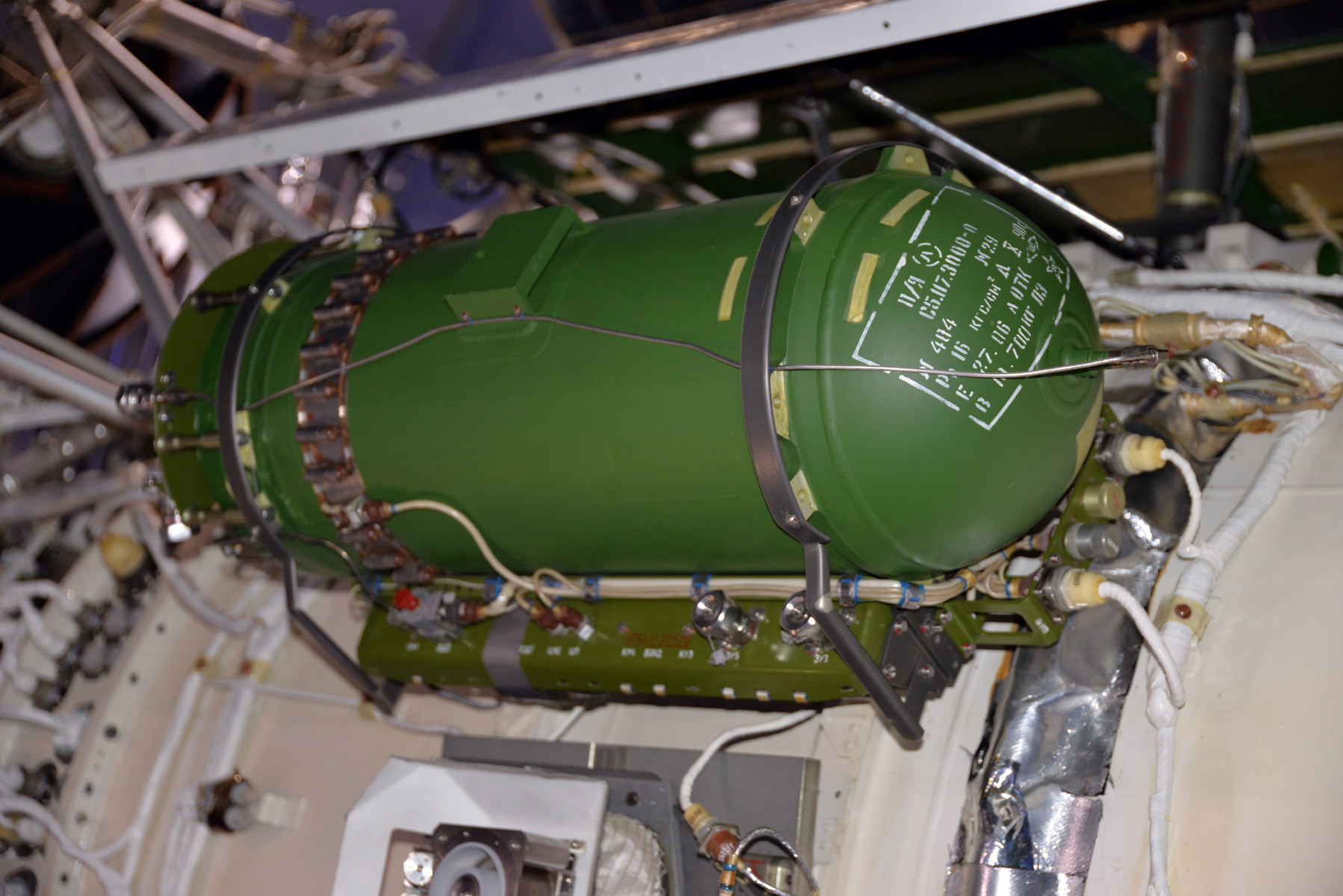
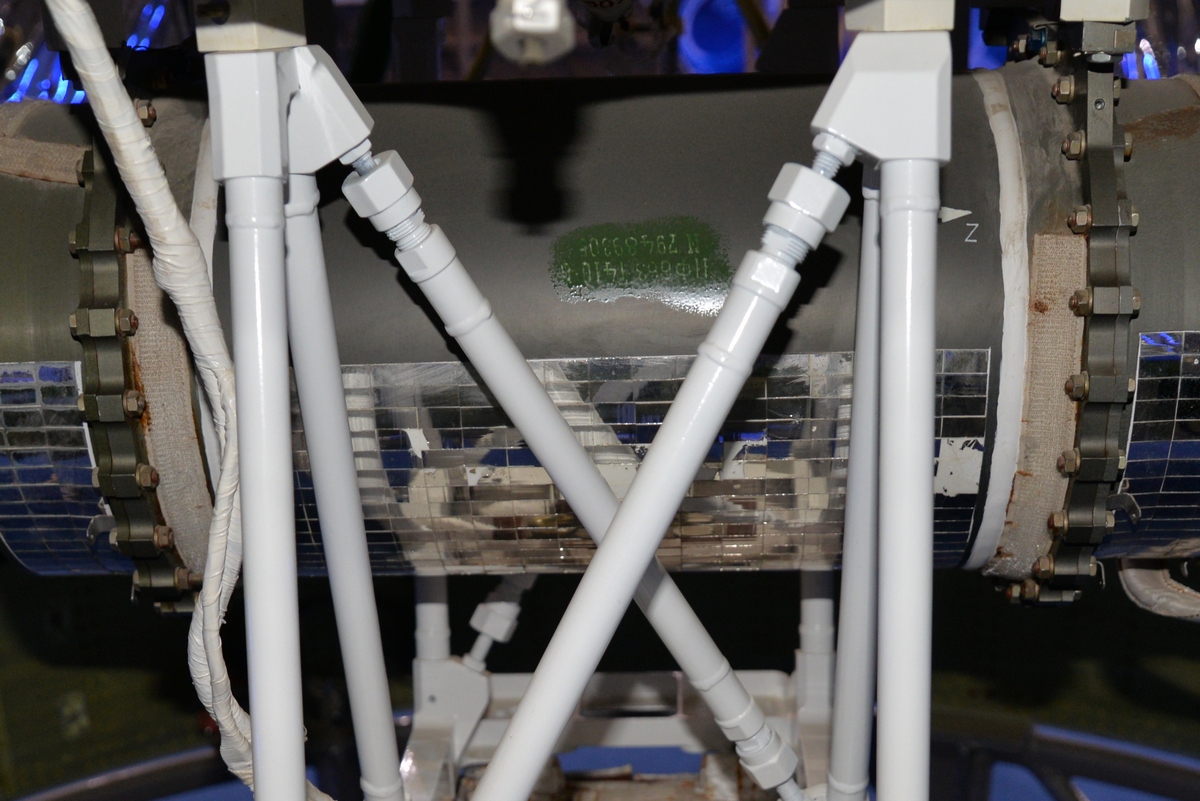
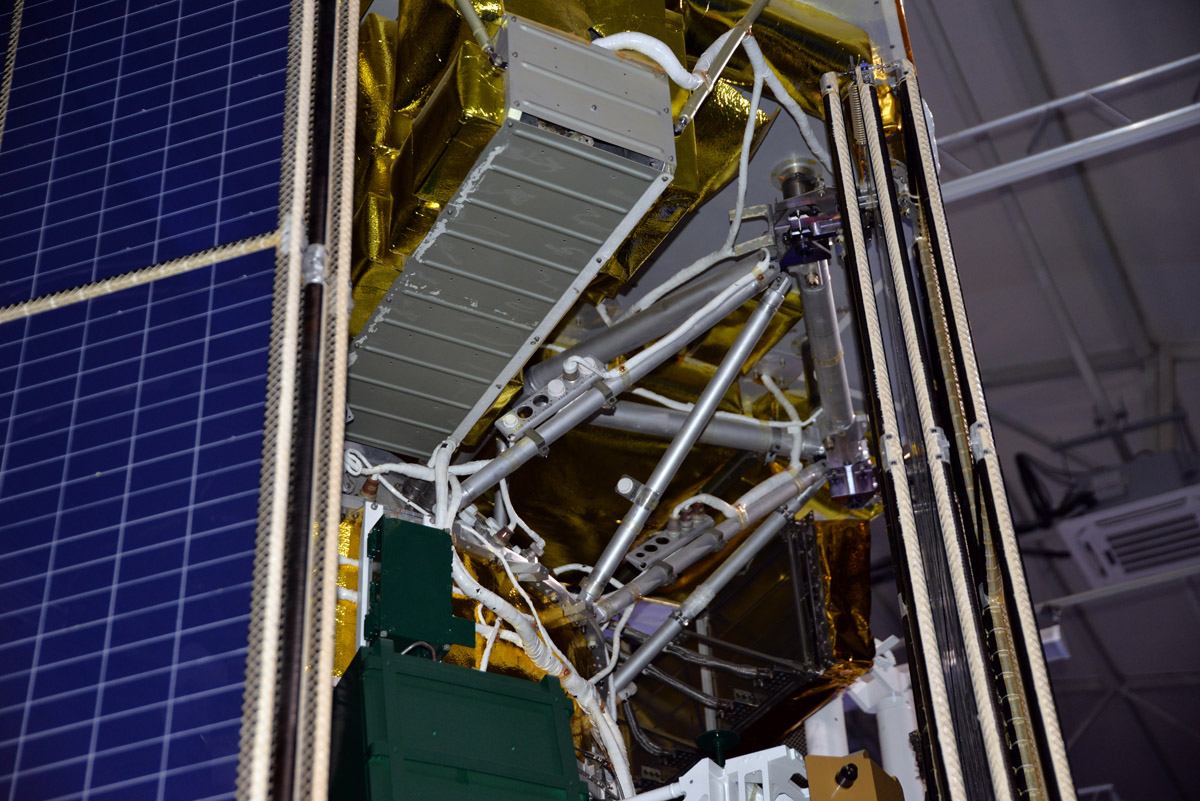
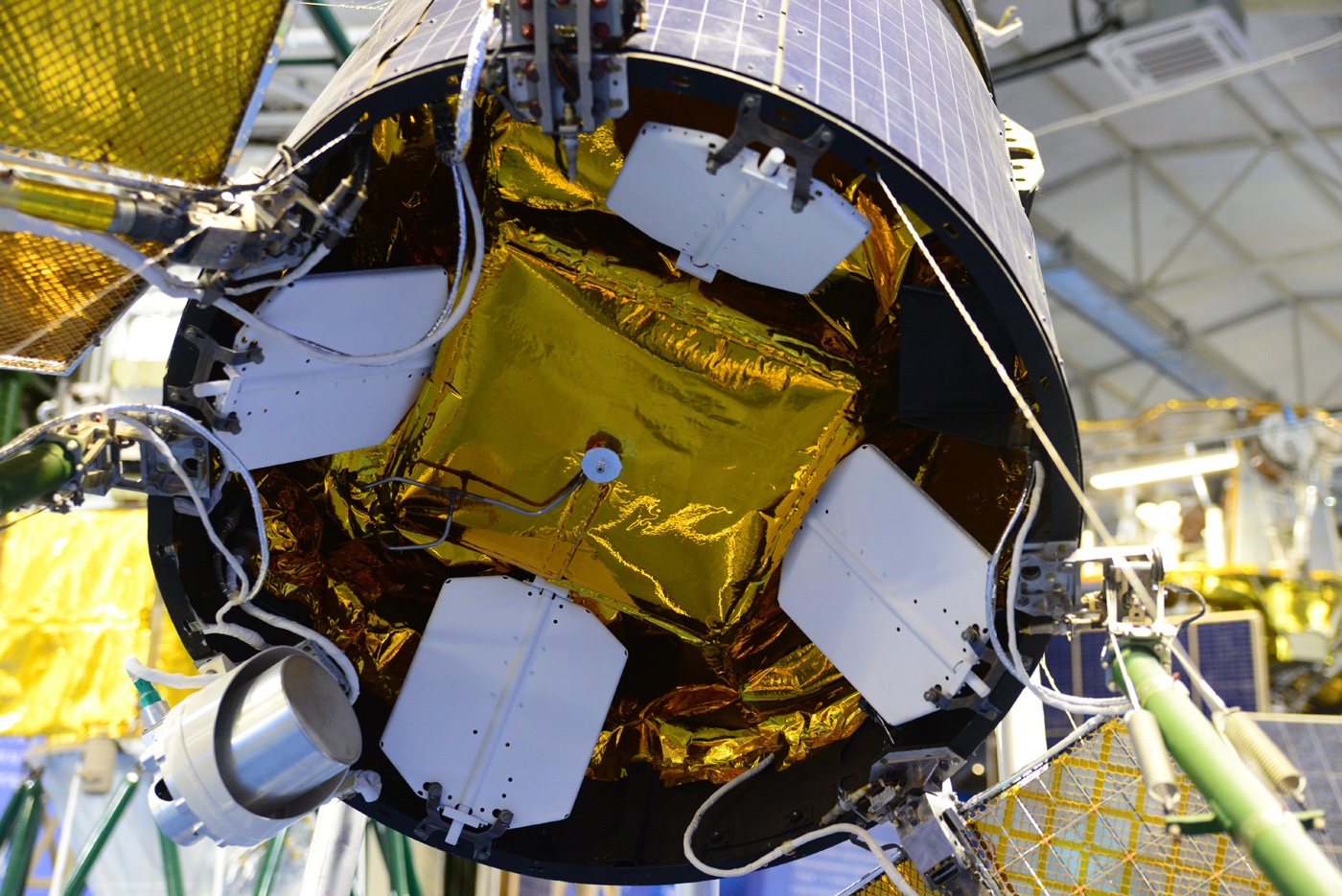
Гермоконтейнер с целевой аппаратурой помещён внутрь каркаса являющегося одновременно радиатором системы терморегулирования
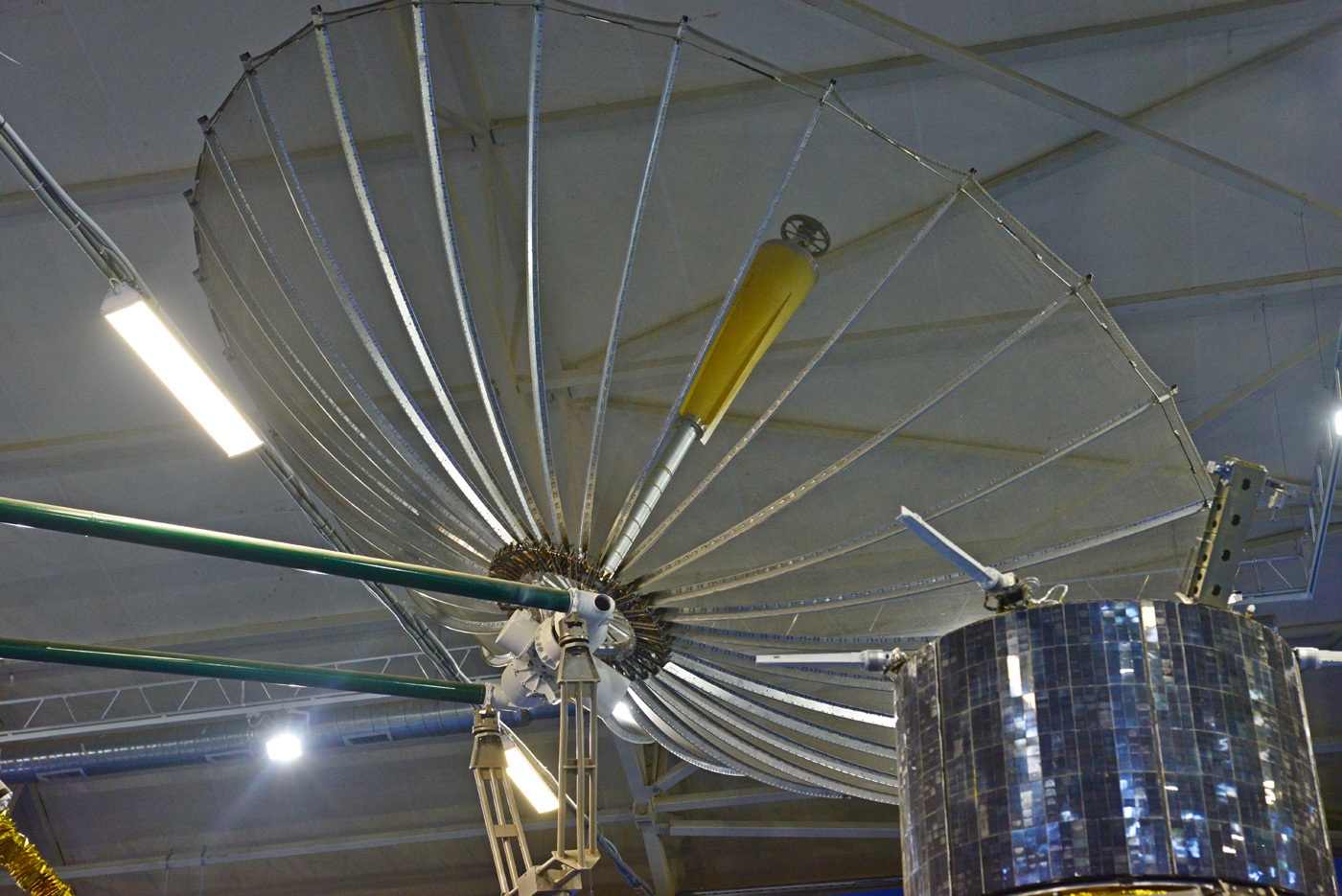
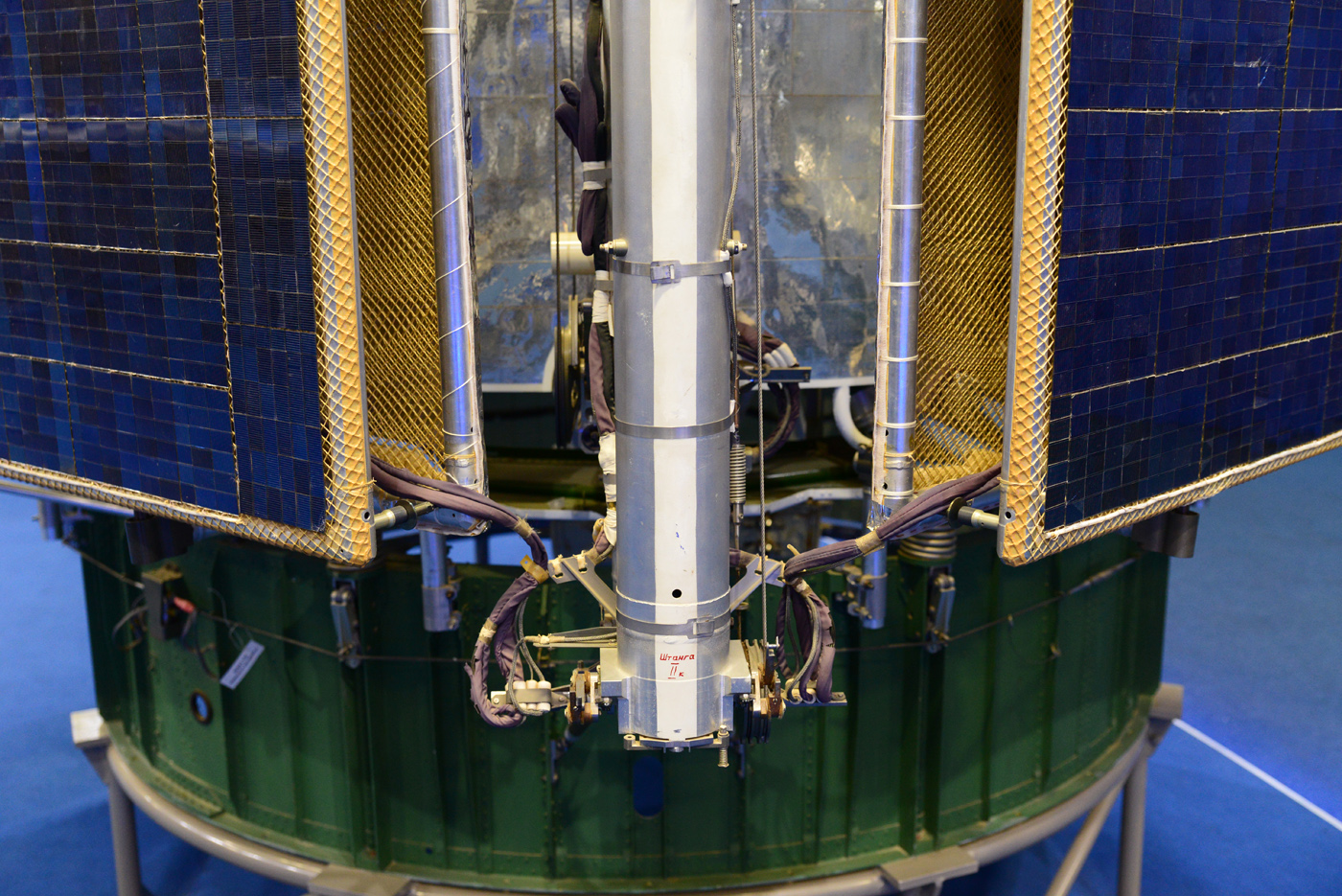
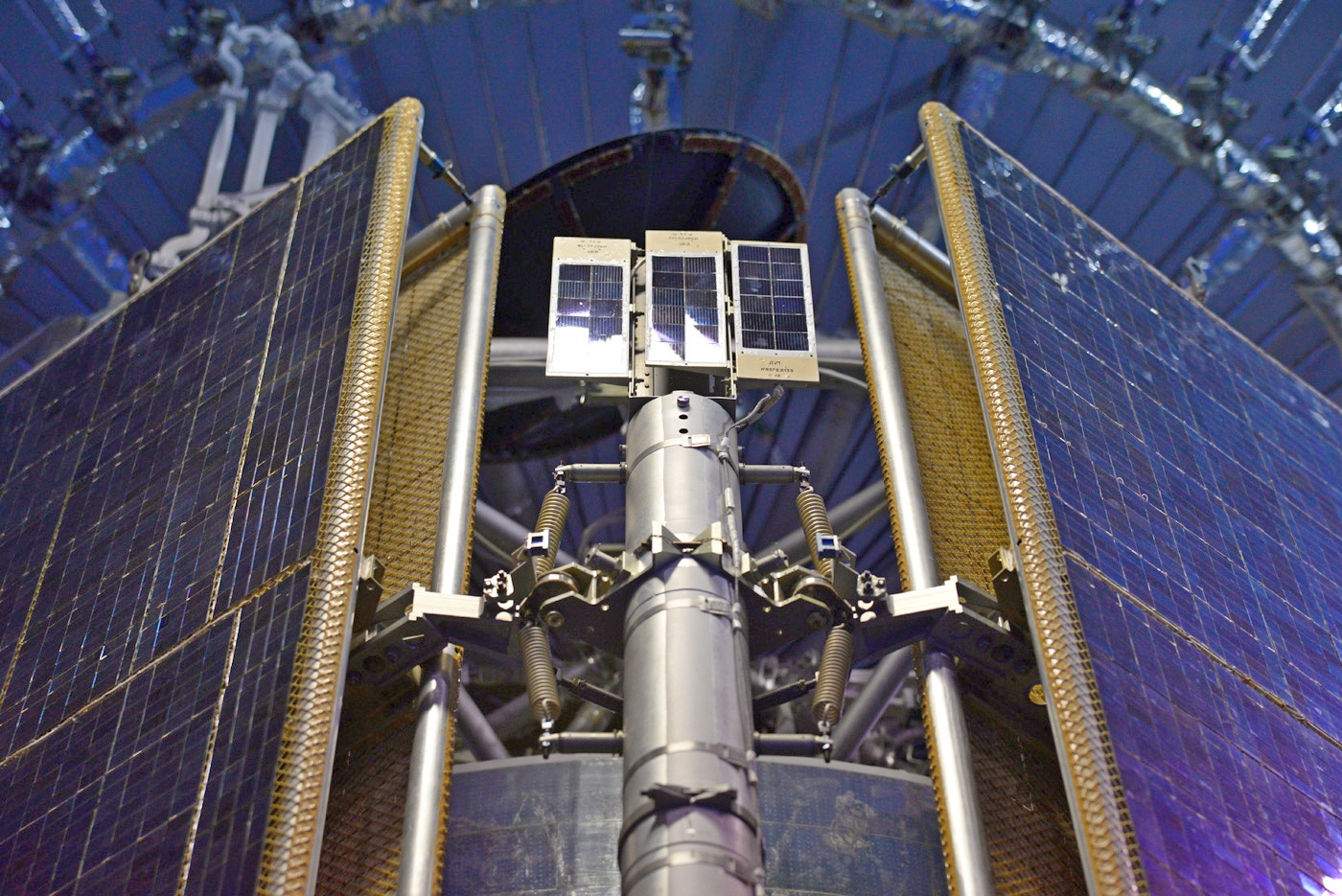
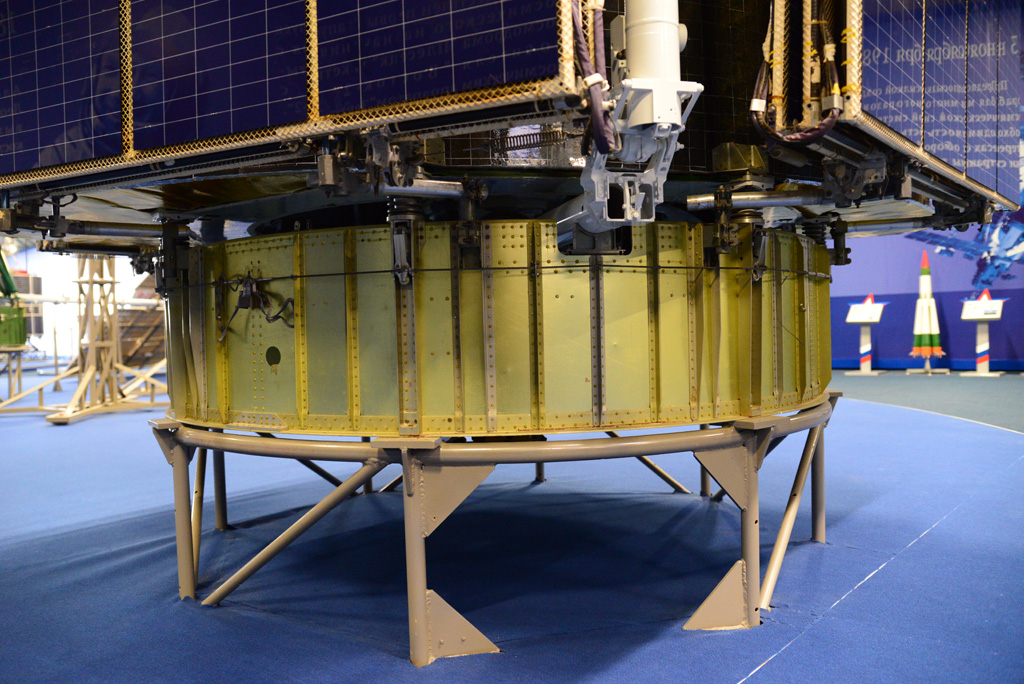
Унаследовав от платформы КАУР-1 «обернутый» панелью солнечной батареей гермоотсек и магнито-гравитационную систему ориентации, «Гео-ИК» получил дополнительные панели солнечной батареей "юбочкой"

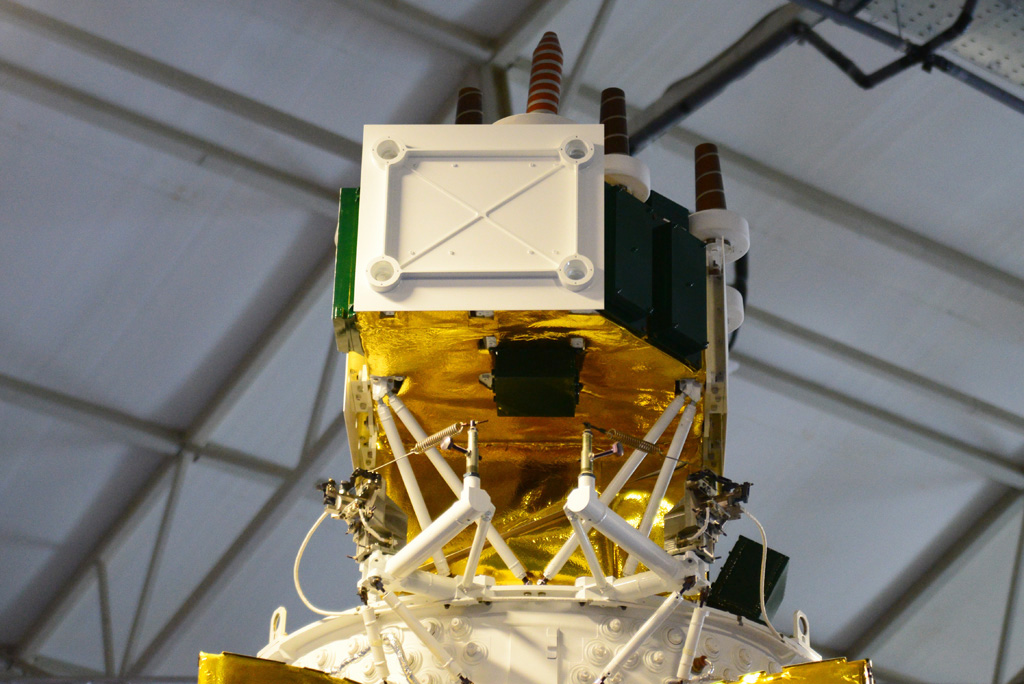
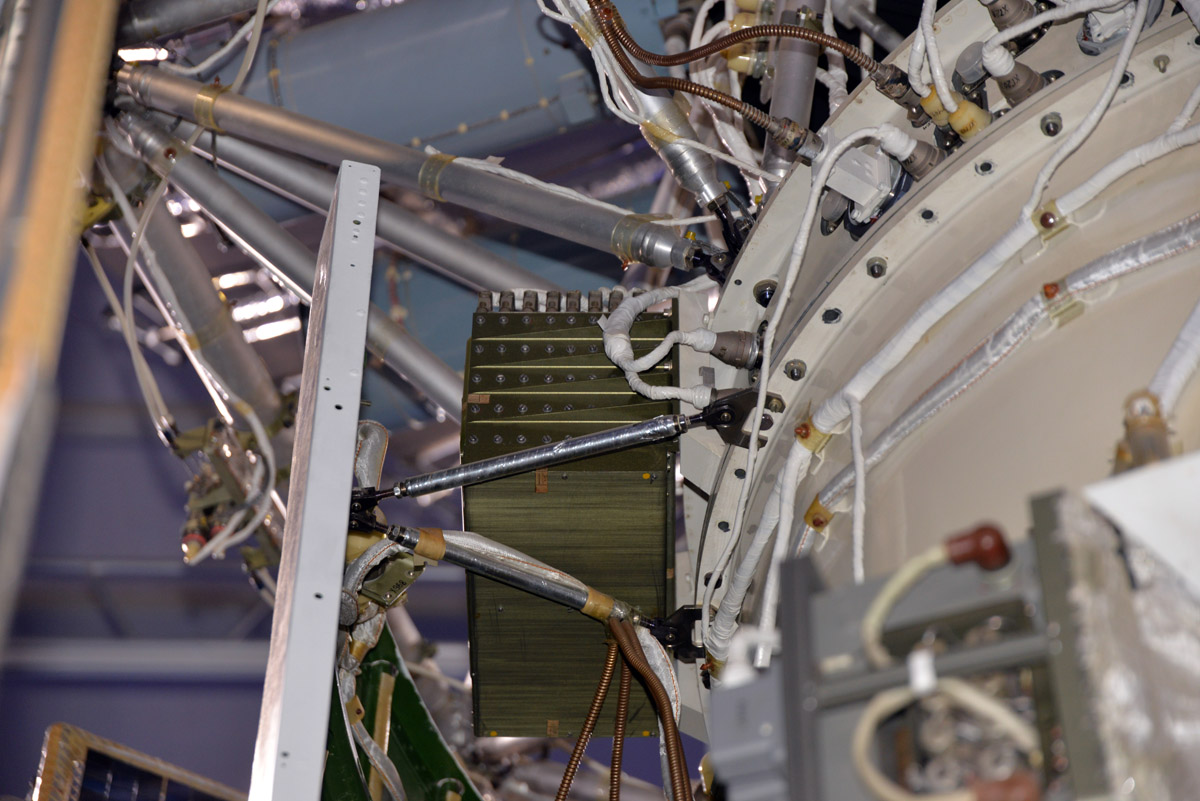
К верхней части контейнера прикреплена ферма, на которой размещены магнитный успокоитель, гравитационное устройство и другие устройства системы ориентации.

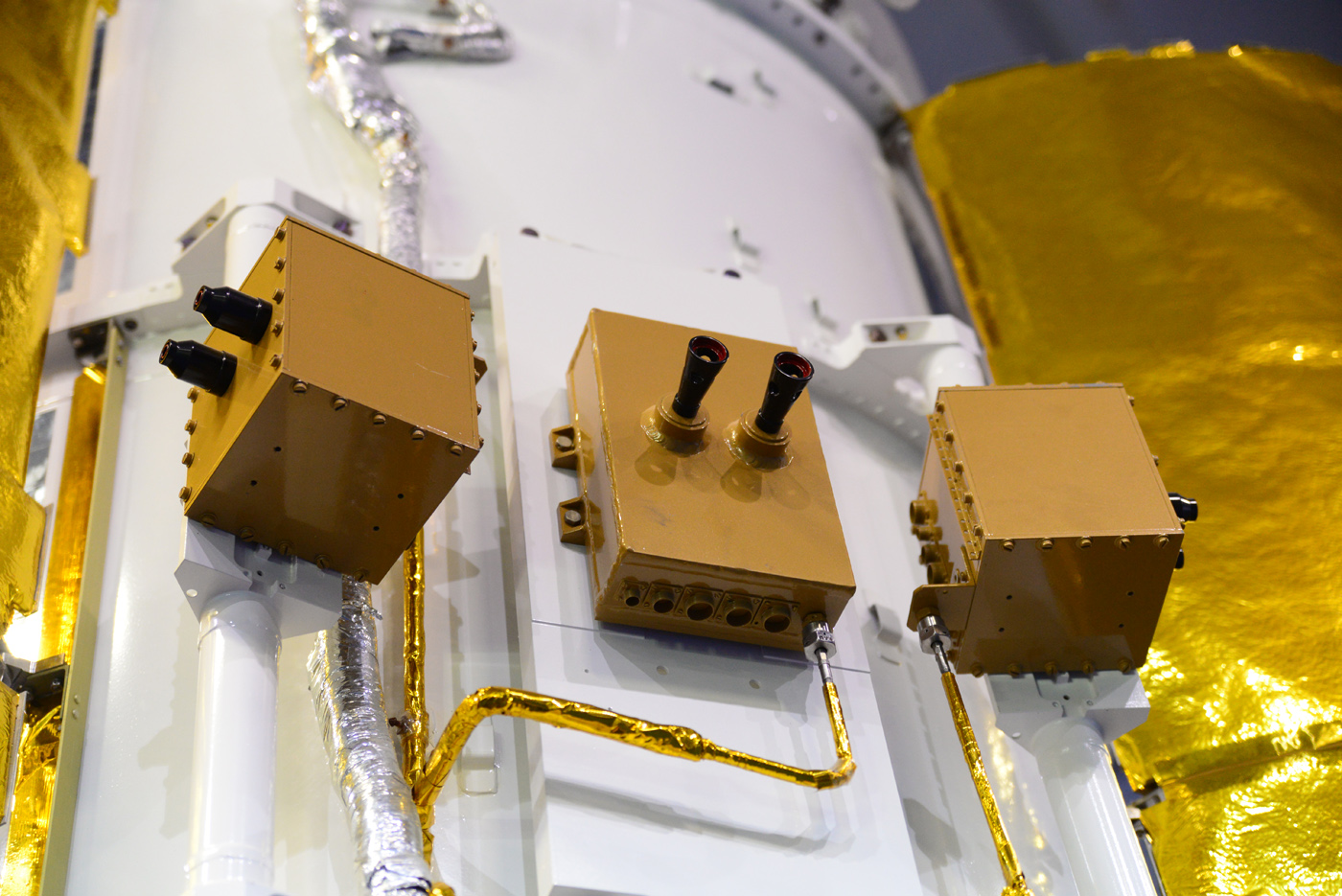
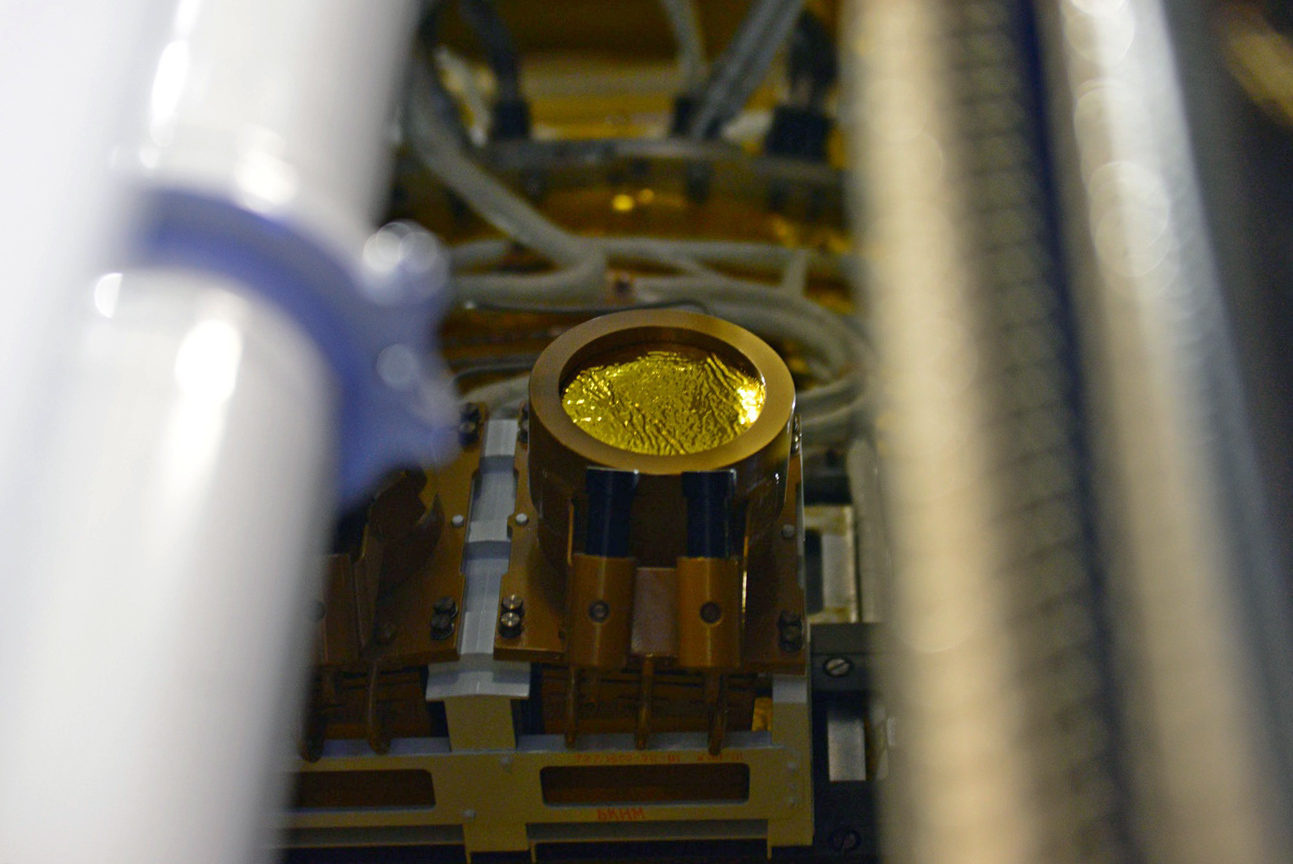
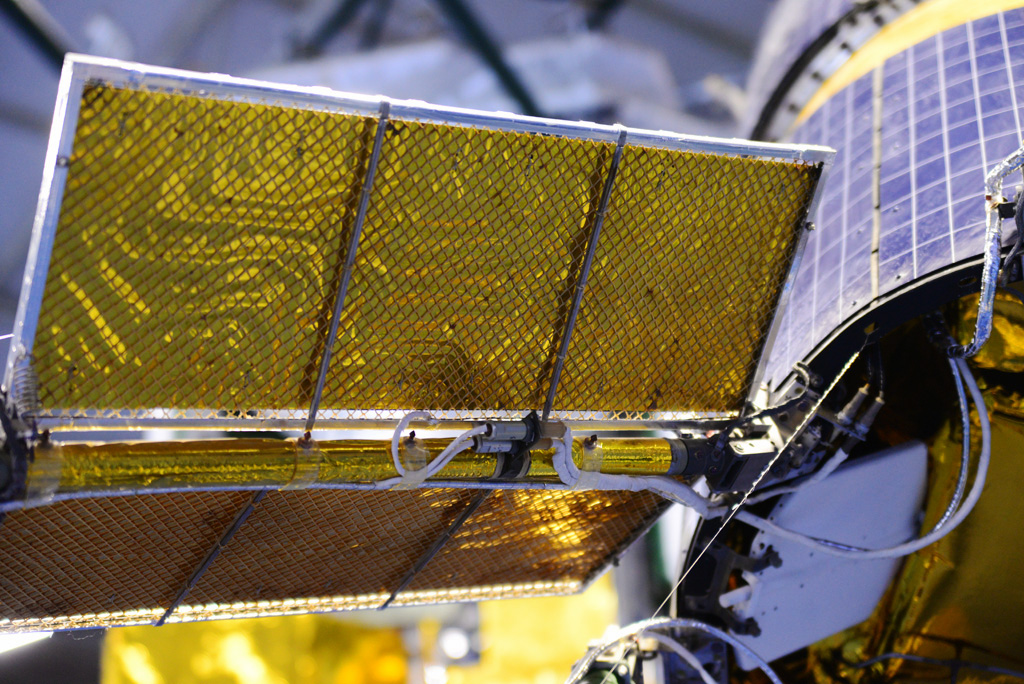
Панель лазерных ретрофлекторов (уголковых отражателей) используется при лазерной локации для решения геодинамических, геодезических, навигационных, научных и прикладных задач и эталонирования радиосистем измерения траектории движения космического аппарата

"КА «Муссон» является основным элементом КГК [космического геодезического комплекса]. Для решения задачи построения мировой геодезической сети используются методы орбитальной и космической триангуляции. С этой целью на борту спутника установлена доплеровская система измерения радиальной составляющей скорости, ретранслятор системы измерения наклонной дальности, оптические уголковые отражатели для наземной лазерной аппаратуры измерения дальности и система световой сигнализации, позволяющая производить серии вспышек, фотографируемых наземными фотоастрономическими установками на фоне звездного неба.
Уточнение гравитационного поля Земли осуществляется с помощью высокоточного радиовысотомера, который производит измерения и предварительную обработку результатов измерений высот от поверхности Мирового Океана с последующей передачей на Землю. В дальнейшем спутниковая альтиметрия обрабатывается совместно с результатами наземной гравиметрической съемки. Одновременно с измерениями, с помощью бортовых запоминающих устройств осуществляется доставка на наземные астрономо-геодезические пункты программ работы с КГК (программы наблюдения).
КА «Муссон» состоит из гермоконтейнера, в котором на приборных рамах размещены специальные и обслуживающие системы и аппаратура. С помощью системы терморегулирования в гермоконтейнере поддерживается заданные климатические и температурные условия, которые необходимы для нормальной работы аппаратуры. Гермоконтейнер устанавливается внутри каркаса, на наружной боковой поверхности которого размещены фотопреобразователи и крепятся восемь панелей солнечных батарей. Поверхность каркаса используется в качестве радиатора системы терморегулирования. В верхней части гермоконтейнера устанавливается ферма, на которой устанавливаются механизмы гравитационного устройства, магнитный успокоитель и другие элементы системы ориентации. К ракете-носителю КА стыкуется с помощью переходника системы отделения, которая остается на ракете, и амортизационной фермы, предохраняющей спутник от воздействия вибрации".
Источник: Космодром "Плесецк". Информационный бюллетень №39

Геодезический спутник «Гео-ИК»

Навигационный спутник «Глонасс-М», 11Ф654М
Создание спутниковых навигационных систем первого поколения, американской Transit (NAVSAT, NNSS) и советской «Циклон», стало настоящим прорывом в навигации и применении ракетного оружия на море. Тем не менее, у доплеровских систем имелись существенные недостатки. Для уточнения своего места перед пуском ракет подводным лодкам часами приходилось ждать сигналы со спутников, а оборудование занимало очень много места. Военным требовалось в произвольный момент и в любой точке Земли определять три пространственные координаты, вектор скорости и точное время. Для этого необходимо одновременно принимать сигналы не менее четырех спутников. На низких орбитах для этого потребовалось бы разместить сотни космических аппаратов. Это было бы очень дорогое и уязвимое решение. Поэтому в 1970-х годах в Советском Союзе и США началось создание спутниковых навигационных систем второго поколения – ГЛОНАСС и NAVSTAR GPS соответственно. Системы второго поколения используют дальномерный метод определения положения. Структура сигналов навигационных спутников такова, что позволяет рассчитать задержку их распространения до потребителя. Помимо этого, с помощью этих же сигналов передается информация, позволяющая рассчитать положение и скорость спутника на момент излучения.


При разработке системы ГЛОНАСС исследования показали, что компромисс между потребительскими качествами навигационной системы и её сложностью достигается при размещении спутников на круговых траекториях высотой 19 000—20 000 километров (для ГЛОНАСС выбрана высота 19 100 километров) с наклонением около 64°. Влияние атмосферы здесь уже незначительно, а гравитационные возмущения со стороны Луны и Солнца еще не приводят к быстрым изменениям орбиты. Теоретически на такой высоте достаточно 18 спутников в трех или шести орбитальных плоскостях, чтобы из любой точки на Земле было видно не менее четырех аппаратов одновременно. Но для стабильной работы системы в условиях рельефа и более подходящего для решения навигационной задачи расположения необходимы 24 работающих спутника, а с учетом резерва в системе надо иметь 27—30 аппаратов.
К аналогичным выводам пришли американские специалисты, расположив, в начальной конфигурации, 24 аппарата в 6 орбитальных плоскостях с наклонением 55 градусов и высотой 20200 км. Основная функция навигационных спутников – формирование и излучение радиосигналов, необходимых для координатно-временного обеспечения потребителей и контроля бортовых систем спутника подсистемой контроля и управления СРНС. Как и в системах первого поколения, спутник выступает в качестве движущегося радиомаяка с известными координатами.
Источник: История спутниковой навигации. Взгляд из ОКБ-10 / КБ ПМ / НИИ ПМ / ИСС имени академика М.Ф. Решетнёва

«Глонасс-М» (наименование по ОКР: «Ураган-М», Индексы: 11Ф654М, 14Ф113) — серия космических аппаратов российской глобальной навигационной системы ГЛОНАСС 2-го поколения, разработанная и выпускаемая ОАО «ИСС» имени академика М. Ф. Решетнёва. От спутников серии «Глонасс» (1-е поколение) отличаются гарантированным сроком активного существования (7 лет). Эти спутники излучают, в отличие от аппаратов предыдущего поколения, уже по 2 сигнала для гражданских потребителей, что позволяет существенно повысить точность местоопределения. 30 июля 2015 года было объявлено о завершении производства спутников серии «Глонасс-М». Им на замену идут аппараты следующего поколения: «Глонасс-К» и «Глонасс-К2».
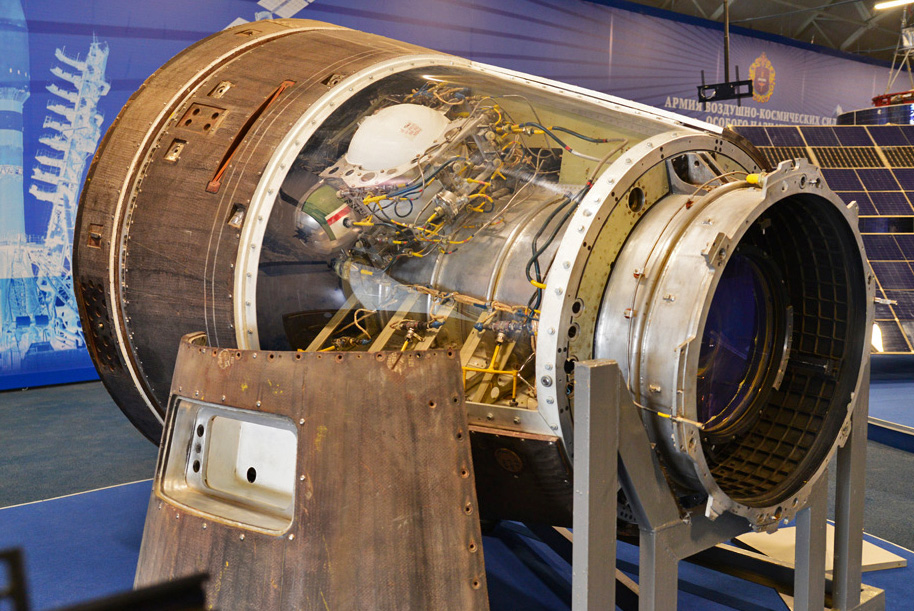
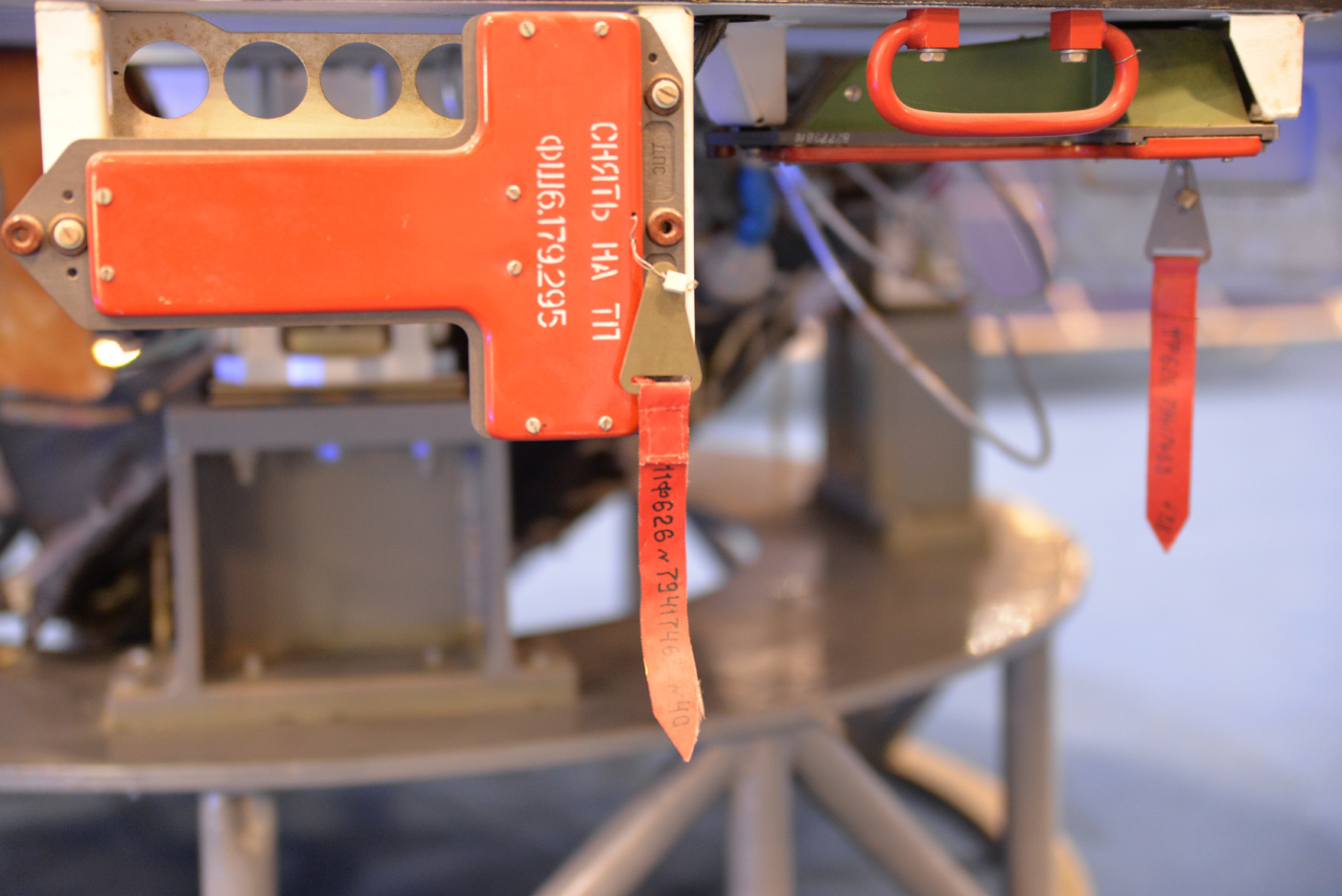
Спускаемый аппарат разведывательного спутника «Зенит-2», 11Ф61
«Зенит» — тип военных советских (российских) разведывательных космических аппаратов, запущенных в период между 1961 и 1994 годами. Для того чтобы скрыть их характер, все спутники запускали под порядковыми названиями «Космос». За 33-летний период было запущено более пяти сотен «Зенитов», что делает его самым многочисленным типом спутников подобного класса в истории космических полётов. Большинство интернет-публикаций так или иначе воспроизводят материал В. Агапова"Запуски космических аппаратов «Зенит-2»", напечатанной в журнале «Новости космонавтики» №10 за 1996 год. Прибегну и я к прямому цитированию этой небольшой статьи: "Согласно исходному техническому заданию спутник должен был нести фотоаппаратуру с фокусным расстоянием не менее метра и дающую “высокое” разрешение. Кроме того, на спутнике должна была стоять фототелевизионная аппаратура, позволяющая передавать информацию по радиоканалу при пролете над территорией СССР, а также аппаратура для ведения радиоразведки, которая тоже обеспечивала запись информации и сброс ее в зоне видимости наземных пунктов приема”.
Внутренние различия были гораздо более существенными. Вместо системы жизнеобеспечения, катапультируемого кресла и средств ручного управления была установлена разведывательная аппаратура, специальная телеметрическая система для передачи разведывательной информации, система управления бортовым комплексом и др. Система управления корабля "Восток" обеспечивала его ориентацию только перед спуском. Для фотосъемки требовалась постоянная трехосная ориентация аппарата с довольно высокой точностью. Управление "Зенитом" осуществлялось не только по разовым командам, выдаваемых с наземных пунктов в зоне видимости, но и посуточной программе работы, закладываемой на борт с помощью командно-программной радиолинии с достаточно высокой пропускной способностью. Даже такие общие системы, как система терморегулирования, пришлось существенно дорабатывать, т.к. сложные оптические системы допускают более узкий диапазон колебания температуры и скорости ее изменения, чем человеческий организм.
Для обеспечения секретности спецаппаратуры и информации была установлена система аварийного подрыва объекта АПО-2. В отличие от использовавшихся ранее средств подрыва она должна была обладать более сложной логикой, позволявшей определить, садится аппарат на своей или на чужой территории".
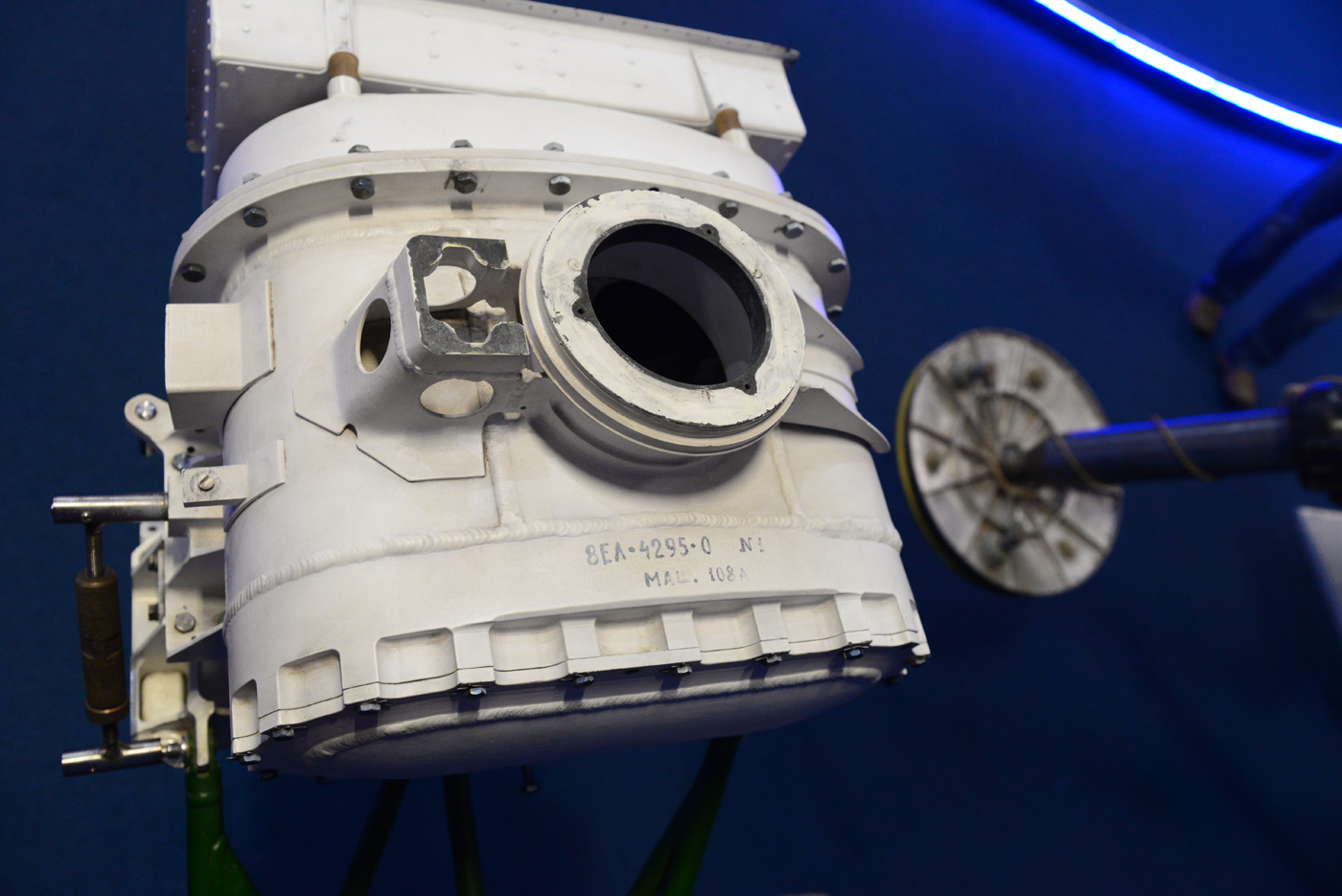
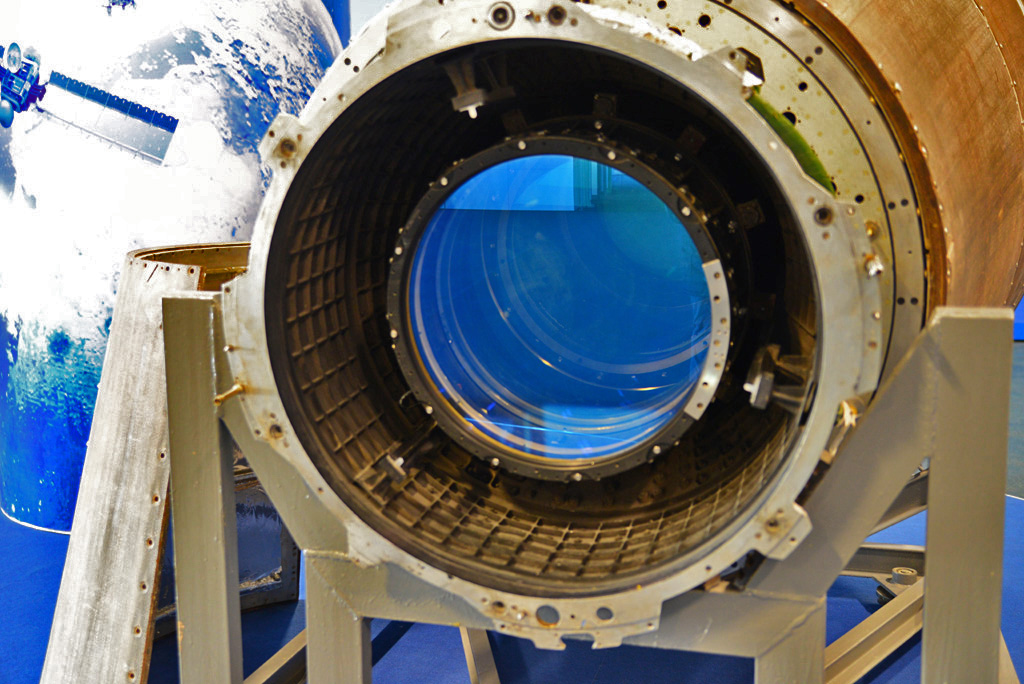
Спутник-разведчик «Зенит-2» – переименованный «Восток», результат работ ОКБ-1 С. П. Королёва (ныне РКК «Энергия») над первым пилотируемым космическим кораблём
Внутри сферической возвращаемой капсулы устанавливалась вся специальная аппаратура (фотографическая, фототелевизионная, радиоразведывательная)

Съёмка осуществлялась через многостекольные иллюминаторы, прорезанные в крышке одного из двух технологических люков большого диаметра
Борис Евсеевич Черток в своём фундаментальном четырёхтомнике «Ракеты и люди» посвятил процессу создания первого спутника-разведчика целую главу «Щит и меч» стратегического назначения. Позволю себе привести объёмную цитату из книги одного из титанов отечественной космонавтики.
"Главным разработчиком фотоаппаратуры для наших будущих разведчиков был определен Красногорский оптико-механический завод. Он имел большой опыт по созданию аппаратуры для аэрофотосъемки. Наши требования предусматривали установку фотоаппаратов в спускаемый аппарат, иллюминатор которого гарантировал герметичность без искажения кадра. Требовалось полностью автоматизировать процесс съемки и протяжки пленки, обеспечить сохранность ее в специальной кассете при спуске на Землю и посадке с ударной перегрузкой до 20 единиц. Первый космический фотоаппарат красногорского завода получил название «Фтор». Это условное наименование так и осталось на последующие годы.
Главный конструктор фотоаппаратов Бешенов и его сотрудники упорно добивались от наших проектантов и конструкторов создания «особых условий» для оптики фотоаппаратов. Одним из самых трудных для нас было требование поддержания температуры объектива с отклонением от заданного значения не более чем на 1°С, а скорость изменения температуры не должна была превышать 0,1°С в час. От незначительной разницы температур на стеклах иллюминатора изменялась их кривизна. Для длиннофокусного объектива фотоаппарата это приводило к искажению изображения.
Мы должны были вводить в фотоаппарат данные о скорости и высоте полета. Они использовались в механизме протягивания пленки для компенсации сдвига изображения. Заданная разрешающая способность снимка могла быть обеспечена только в том случае, если отклонение от заданной скорости компенсационного движения пленки не приводило к смещению «остановленного» изображения более чем на 0,01 мм.
В расчетах и испытаниях на Земле все эти и масса других проблем вроде бы были решены, но что будет в полете?
По командам с Земли предусматривалось управление набором светофильтров, экспозицией, выбор координат начала и конца съемки и числа кадров. Детальная программа управления фотопроцессом по радиолинии закладывалась в «Гранит»- бортовое программно-временное устройство. Над его разработкой в отделе Шустова трудился Исаак Сосновик и Нина Квятковская. Проектанты Евгений Рязанов и Юрий Фрумкин координировали «идеологию» работы «Фтора» с возможностями «Гранита».
Предусматривался и вариант оперативной фоторазведки- возможность получать информацию в процессе полета, не ожидая возвращения на Землю спускаемого аппарата, его поисков, извлечения, доставки и проявления пленки. На этот случай был разработан специальный фототелевизионный комплекс «Байкал». Фотопленка непосредственно после съемки тут же на «борту» поступала в проявочное устройство. После проявки, закрепления и сушки кадр за кадром протягивались перед видеокамерой и по телевизионному каналу «Калина» передавались на Землю. Это сложное устройство разрабатывалось НИИ-380 в Ленинграде.
...
«Байкал», занимавший большой объем в спускаемом аппарате, испытатели на полигоне сразу переименовали в БПК- «банно-прачечный комбинат». И тому были веские основания. При первых же испытаниях из него потекли растворы и пошел пар. Вообще его подготовка к полету доставляла массу хлопот, вызывала упреки и остроты в адрес молодых разработчиков.
Для радиоразведки- обнаружения мест расположения радиолокаторов и исследования возможности подслушивания радиопереговоров- институт № 108, которым в свое время руководил Аксель Берг, разработал сложную радиоаппаратуру, именовавшуюся «Куст». Собранная этим «Кустом» информация записывалась специальным запоминающим устройством, которое должно было быть доставлено на Землю в спускаемом аппарате.
...
Управлять космическим разведчиком, который назвали «Зенит-2», было куда сложнее, чем «Востоками». Для гарантии попадания в поле зрения фотоаппарата нужных объектов предусматривалась довольно сложная программа управления с Земли по специальной командной радиолинии. По сравнению с «Востоками», «Лунами», «Венерами» и «Марсами», для которых управление осуществлялось с помощью разовых команд и уставок (заданное числовое значение для ограниченного числа параметров), объем информации, которую надо было передавать на борт «Зенита», возрос в десять раз. Каждый сеанс фотографирования требовал своей индивидуальной программы".
...
Испытания «Зенита-2» с сентября 1962 года проводились при активном участии молодых специалистов филиала № 3. Они погружались в совершенно новую область с таким увлечением, что истинные создатели «Зенита-2» убеждались: в Куйбышеве наш «Зенит-2» будет тоже любимым ребенком. Не обошлось и без горьких разочарований. Качество изображения после обработки пленки в «Байкале» и передачи по радио на Землю было низким. По предложению военных мы с четвертого летного «Зенита-2» сняли «Байкал» и вместо него установили два модернизированных фотоаппарата с фокусным расстоянием по одному метру. Таким образом, начиная с «Космоса-10» на борту устанавливали по четыре фотоаппарата. Три из них с фокусным расстоянием по одному метру производили съемку трассы шириной 180 км. Можно было производить съемку трасс сериями различной протяженности. С помощью программных разворотов можно было фотографировать районы, расположенные в стороне от трассы полета. Совместная обработка фотографий позволяла получать пространственное изображение местности, картографирование и точную фотографическую привязку.
В 1962 году было произведено пять удачных пусков «Зенита-2». Обработка разведывательной фотоинформации давала такие результаты, что умные военные в Генеральном штабе, не считаясь с тем, что, по нашим понятиям, продолжаются испытательные полеты, требовали увеличить частоту пусков. На заводах и полигоне подготовку и пуски уже перестали считать экспериментальными. Это была работа.
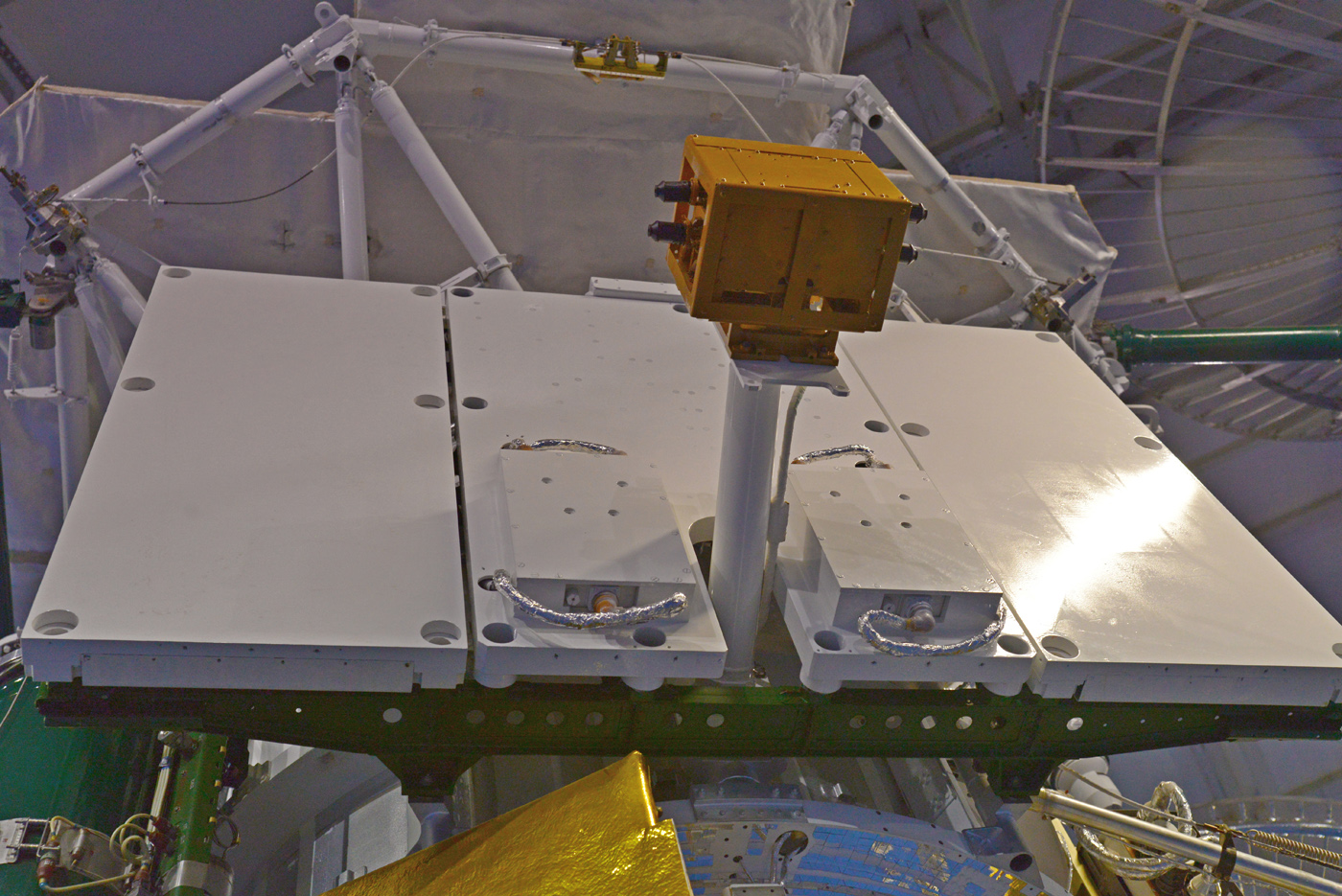
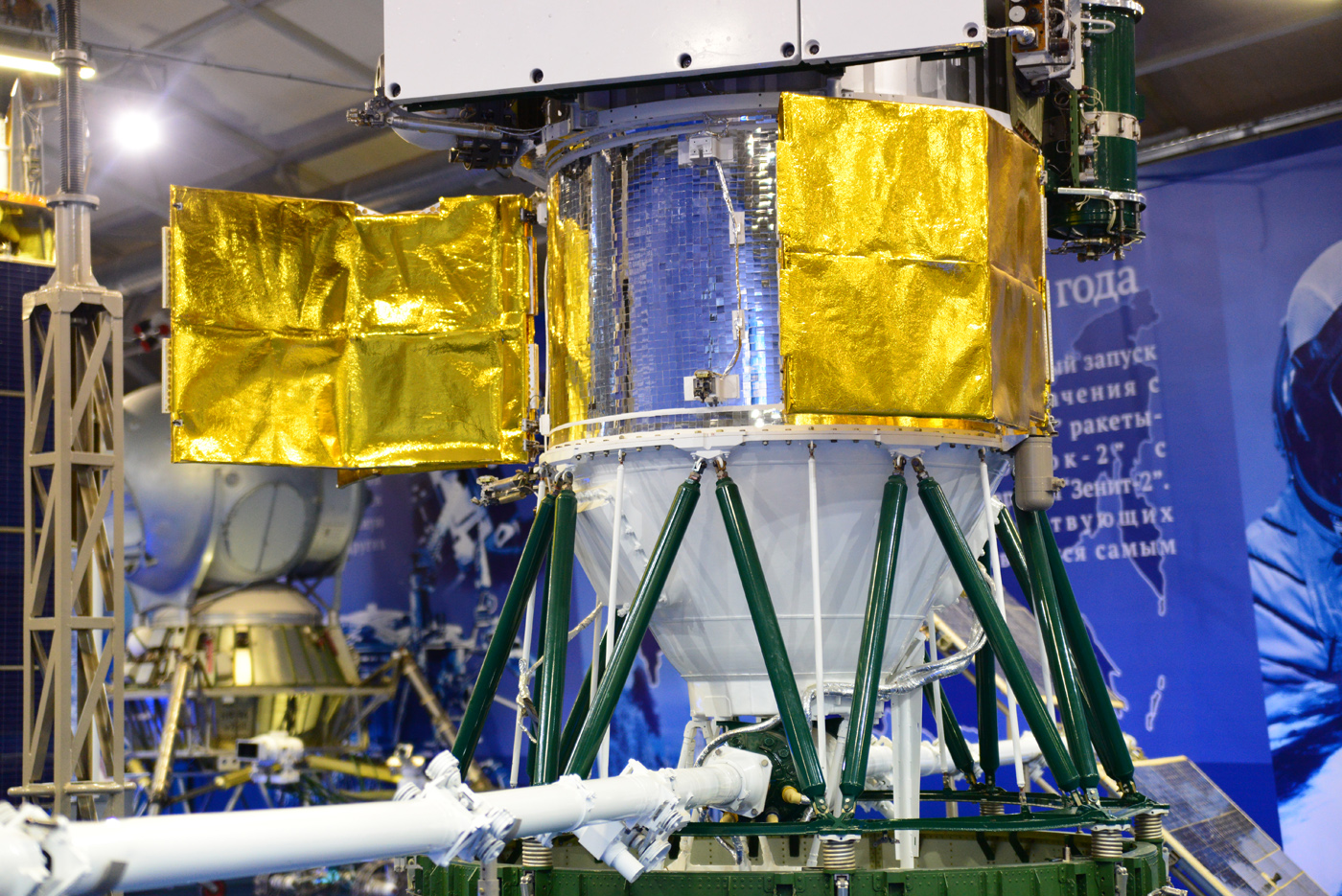
Отсек специальной аппаратуры спутника видовой разведки «Янтарь-2К», 11Ф624
Согласитесь, что в столь щекотливом деле, как разведка, особый интерес представляет точка зрения оппонента. 10 августа 2020 года портал The Space Review опубликовал интересную статью Bart Hendrickx, "Upgrading Russia’s fleet of optical reconnaissance satellites". Её перевод на русский язык опубликован в БЛОГе bmpd, выходящим под эгидой Центра анализа стратегий и технологий. Цитата:
"Большинство разведывательных спутников, летавших в советское время, возвращали пленку на Землю в капсулах. Спутники этого типа продолжали использоваться после распада Советского Союза, последний из которых был запущен в 2015 году. Они назывались «Зенит» (девять типов, более 600 запусков в период с 1961 по 1994 год), «Янтарь» (пять типов, почти 180 запусков с 1974 по 2015 год) и «Орлец» (два типа, 10 запусков с 1989 по 2006 год). Все эти спутники были спроектированы и построены Центральным специализированным конструкторским бюро (ЦСКБ) и его дочерним заводом "Прогресс" в Куйбышеве (переименованным в Самару в 1991 году). Оно было основано в 1958 году как филиал ОКБ-1 Сергея Королева, а в 1974 году стало самостоятельным.
Недостатками спутников с системой возврата пленки были ограниченный запас пленки, которую они могли нести (и, следовательно, их ограниченный срок службы), и, что более важно, их неспособность своевременно передавать изображения. В 1976 году Соединенные Штаты вывели на орбиту свой первый цифровой разведывательный спутник KH-11 / KENNEN, используя электронно-оптическую технологию для передачи изображений на Землю в реальном масштабе времени. Было запущено 16 спутников этого типа, четыре из которых в настоящее время находятся на орбите. Предполагается, что они несут телескоп с главным зеркалом диаметром 2,4 метра, их сравнивают с космическим телескопом Hubble, но смотрящими на Землю, а не на Вселенную, и имеют теоретическое разрешение на местности 0,15 метра. Спутники отправляют изображения на Землю через спутники ретрансляции данных, находящиеся на высокоэллиптических и геостационарных орбитах.
Советский Союз запустил свой первый оптико-электронный разведывательный спутник только в декабре 1982 года. Аппарат использовал платформу пленочных спутников «Янтарь» и традиционную оптическую камеру, не способную соответствовать разрешающей способности зеркального телескопа KENNEN. Кроме того, на нем была инфракрасная камера для ночных наблюдений. Спутники первого поколения («Янтарь-4КС1», или «Терилен») с расчетным разрешением 1 метр с высоты 200 километров в период с 1982 по 1989 год запускались девять раз. Усовершенствованный спутник второго поколения («Янтарь-4КС1М», или «Неман») имел разрешение менее метра, в период с 1986 по 2000 год было выполнено 15 запусков. Продолжительность полета постепенно увеличивалась с шести месяцев до более года, но даже это было намного короче, чем многолетние миссии, выполняемые американскими спутниками цифровой разведки.
Только в 1983 году советское правительство санкционировало разработку спутника, который по своим характеристикам был близок к KENNEN. Для этого Ленинградскому оптико-механическому заводу (ЛОМО) было предписано построить оптическую систему 17В317 с телескопом с диаметром зеркала 1,5 метра. Он должен был летать на двух разных типах спутников. Один, называвшийся «Сапфир», должен был быть построен ЦСКБ-Прогресс и выводиться на низкие орбиты для задач "ближней" целевой разведки, а другой, получивший название «Аракс» (также известный как «Аркон»), должен был быть произведен НПО им. Лавочкина и летать на гораздо более высоких орбитах для задач разведки обширных районов. В конечном итоге «Сапфир» так и не был запущен, а два спутника «Аракс», которые НПО им. Лавочкина удалось запустить в 1997 и 2002 годах, вышли из строя задолго до истечения расчетного срока службы."

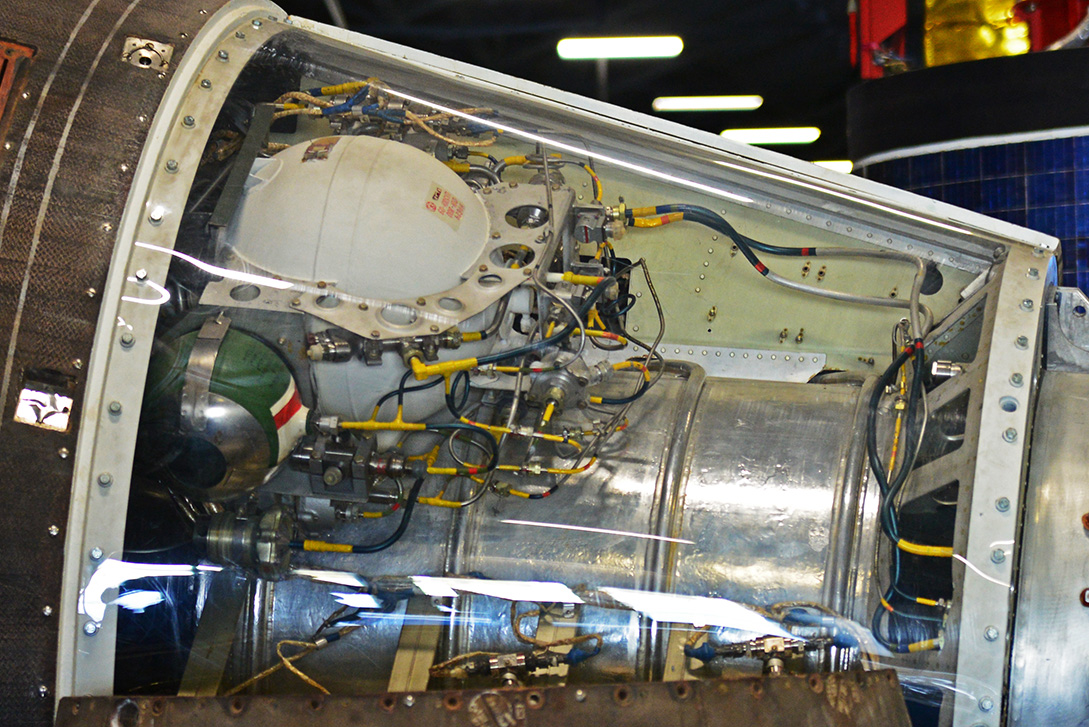
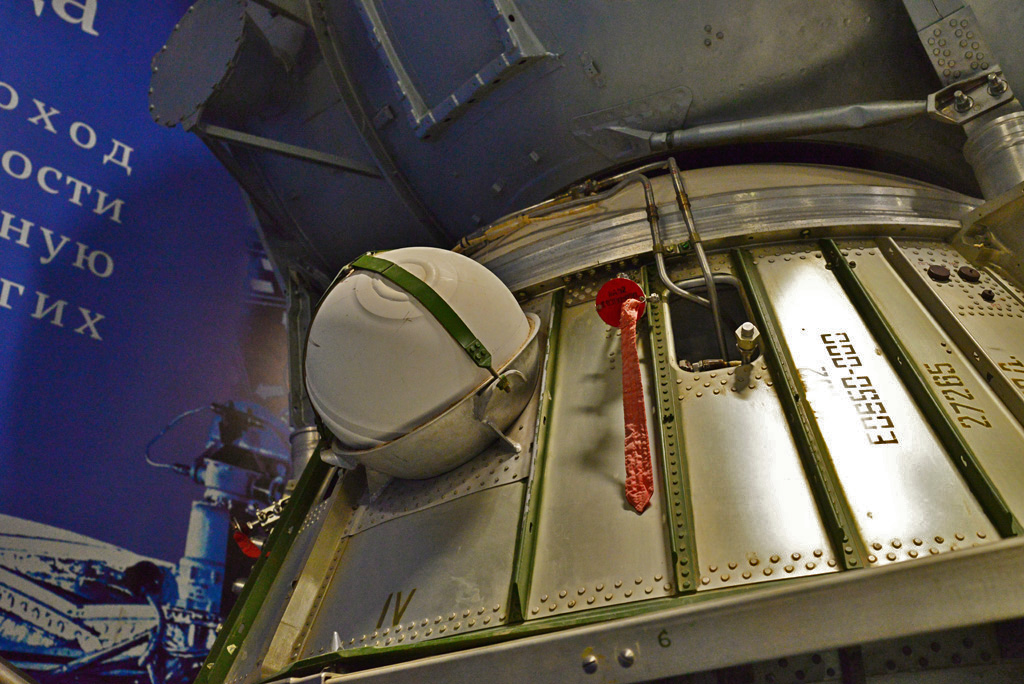
На табличке текст: "«Лазурь» — семейство российских специализированных спутников видовой разведки, разработанных в дополнение, а затем и заменивших разведывательные аппараты серии «Зенит»". Эта последовательность букв заимствована из статьи Википедии о космических аппаратах серии «Янтарь». Отличие только в том, что из текста исчезли слова "ранее — советских". Между тем маркировка на экспонате: 11Ф624 1106А2-0 №1403181. Кроме того, на закрытых плексигласом узлах, хорошо видны индексы 11Ф624. Это позволяет сделать вывод о том, что перед нами наследник разведывательных аппаратов серии «Зенит» – отсек специальной аппаратуры спутника видовой разведки «Янтарь-2К».
За счёт применения системы электропитания на базе солнечных батарей «Янтарь-2К» работал на орбите в два раза дольше «Зенита» — месяц против 8-14 дней. Спутник был скомпонован из трёх отсеков: агрегатного, приборного и отсека специальной аппаратуры. Космический аппарат имел по бокам две возвращаемые капсулы сферической формы с собственными тормозными двигателями. В них перематывалась отснятая фотопленка. Затем она обрезалась, капсула отстреливалась, запускался тормозной двигатель. Капсула входила в атмосферу, тормозилась за счет сопротивления атмосферы и совершала посадку на парашюте в заданном районе. Таким образом отснятая за время полёта фотопленка попадала на Землю в три этапа: дважды в капсулах (на девятые и восемнадцатые сутки полета) и один раз в спускаемом аппарате.
Специально для «Янтаря» специалисты ПО «Красногорский завод» изготовили фотографическую аппаратуру космической разведки – серию особо детальных аппаратов «Жемчуг», отмеченную Ленинской премией в 1976 и в 1982 годах. После завершения программы полёта отсек специальной аппаратуры возвращался на Землю и доставлял дорогостоящее оборудование. В результате фотоаппаратура «Жемчуг-4» (в последствии «Жемчуг-18») и бортовая вычислительная цифровая машина «Салют-3М» использовались многократно.
Дополнительно:
«Янтарь-2К» в Техническом музее, г.Тольятти
«Янтарь-4К1» в Музейно-выставочном центре «Самара Космическая»
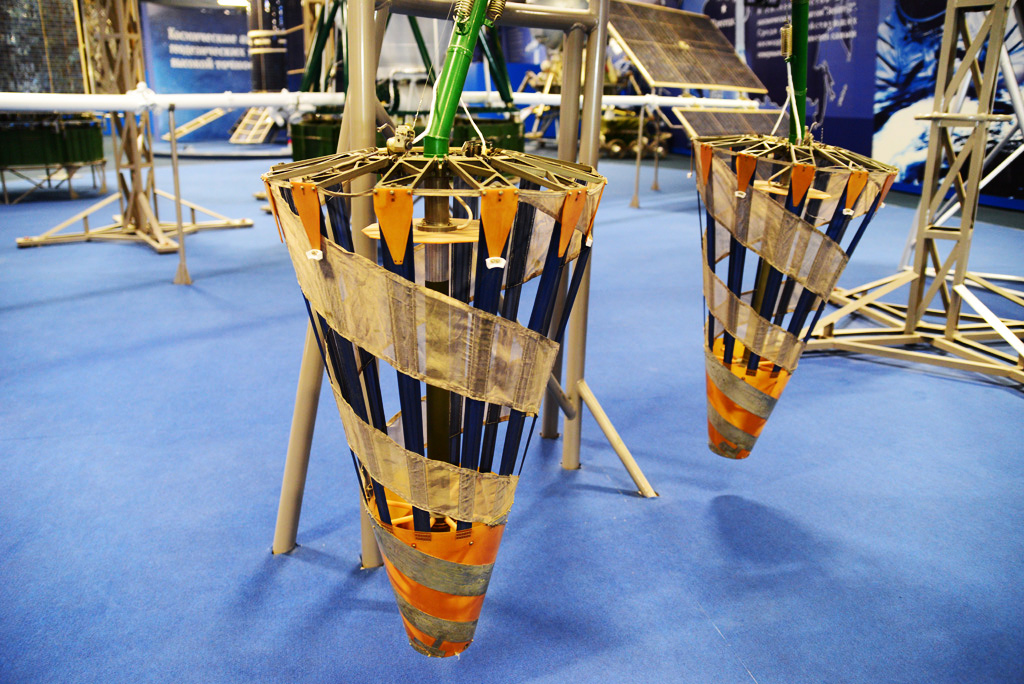
Спутник-мишень «Лира», 11Ф631
В 1960-ых годах в СССР приступили к созданию системы противокосмической обороны, получившей название «ИС» (истребитель спутников). Впервые в мире была разработана система противокосмической обороны на базе маневрирующих космических аппаратов, оснащенных головками самонаведения и средствами поражения целей. Она была предназначена для поражения искусственных спутников Земли военного назначения, в том числе маневрирующих на орбите. В состав комплекса входил высокоманевренный космический аппарат «ИС», РН, стартовая и техническая позиции, главный командно-вычислительный центр. В 1978 году комплекс был принят на вооружение и состоял на боевом дежурстве до 1993 года. ИС запускался на орбиту ракетой-носителем «Циклон-2», обеспечивал перехват цели уже на втором или последующих витках и поражал вражеский КА направленным потоком поражающих элементов.
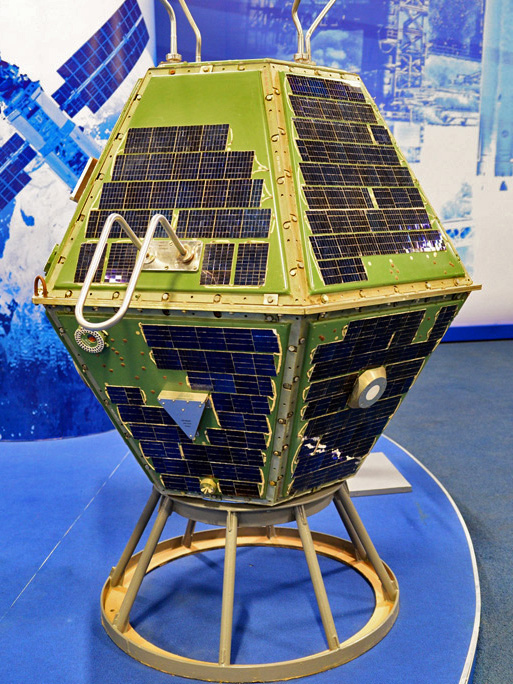
Спутник-мишень «Лира», 11Ф631

Маркировка: 11Ф631 №67067414
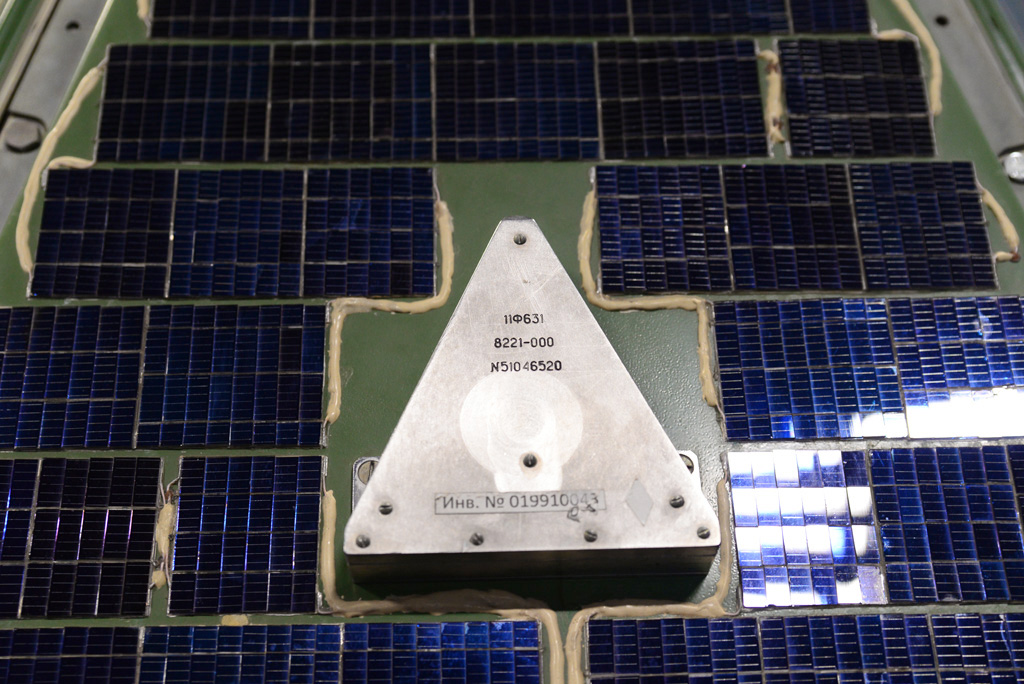
Маркировка: 11Ф631 №51046520

Что означает №82737420 – не выяснил
"В августе 1970 г. впервые в мире, по целеуказаниям Центра контроля космического пространства, космическим аппаратом-перехватчиком комплекса «ИС» осуществлен первый перехват и поражение космического аппарата-мишени при взаимодействии штатных средств полного состава. В эксплуатации находились уже все радиолокационные ячейки узлов ОС-1 и ОС-2, командно-измерительный пункт и первая очередь ЦККП, откуда поступало целеуказание. В КБ «Южное» завершилась разработка новой штатной космической мишени-ИСЗ 11Ф631 «Лира». Специально созданная в КБ «Южное» Министерства общего машиностроения космическая мишень-ИСЗ 11Ф631 позволяла использовать мишень до трех раз для обстрела её боевой осколочной частью в космическом пространстве. В ходе согласования тактико-технического задания на разработку мишени, по указанию Главного оперативного управления Генерального штаба, заказчиком мишенного комплекса было определено Главное управление космических систем (ГУКОС) Министерства обороны.
...
Рассказывает старший научный сотрудник ЦНИИ «Комета» К.А. Власко-Власов: «В 1966 году заказчик потребовал разработать ИСЗ-мишень, эффективная отражающая поверхность которой не превышала бы одного квадратного метра, т.е. соответствовала бы тактико-техническому заданию. Вначале мы решили обойтись надувными шарами. Шары предполагалось изготовлять из металлизированной майларовой пленки и перед отстрелом от аппарата в космосе заполнять их воздухом или газом. За этот проект взялось Долгопрудненское КБ, имевшее опыт разработки и изготовления авиационных парашютов. Шары быстро изготовили, запустили в космос и убедились, что они малопригодны. Заданную эффективную поверхность они имитировали хорошо, но зафиксировать их поражение было трудно. Создать методику определения количества осколков, попавших в такую мишень, и вычислить эффективность поражения практически не представлялось возможным. Осколок пробивал в шаре дырку, часть воздуха выходила, но шар оставался на орбите, вызывая бесконечные споры о том, попали или непопали?
Имея хорошие отношения, А.А. Расплетин и М.К. Янгель договорились сделать специальную облегченную конструкцию ИСЗ-мишени, снабдив её телеметрической аппаратурой, позволяющей при поражении подсчитать количество поразивших её осколков боевой части. Главным конструктором был назначен В.М. Ковтуненко, который на базе юстировочного спутника ДС-П-1 сделал отличную мишень.
Она представляла собой дюралевый гексаэдр (12-гранник) поперечным сечением около одного метра. Панели многогранника оклеивались треугольными стекловолоконными пластинами, прошитыми токопроводящими проводниками. Внутри гексаэдра размещался небольшой бронеконтейнер с телеметрической станцией. Коммутатор станции обсчитывал все токопроводящие структуры треугольных пластин и сообщал об их целостности. После поражения он же сообщал о том, что токопроводящая проволочка разорвана. Количеством разорванных проволочек определялось минимальное количество осколков боевой части, попавших в мишень. Запуск ИСЗ-мишени проводился с Плесецка с помощью ракеты-носителя 11К65, созданной на базе боевой ракеты Р-14 М.К. Янгеля».
...
Не все пуски на перехват были успешными. Во время летных конструкторских и совместных испытаний было запущено 19 КА-перехватчиков. Из них 11 оказались удачными, а в 8 запусках по разным причинам поставленные задачи не были выполнены. Однажды произошла серьезная неприятность, задержавшая испытания почти на полгода. 25 февраля 1971 года был запущен перехватчик «Космос-397» по ИСЗ-мишени «Космос-394» (штатная мишень «Лира»). А 4 апреля по той же мишени был запущен перехватчик «Космос-404». Оба перехватчика были выведены точно в район мишени, захватили её на сопровождение, самонавелись, обеспечивая промах менее десяти метров (допустимый промах не более 50 метров), но боевая часть ни в том, ни в другом случае не поразила мишень. Как выяснилось позже, существовала ещё одна конструктивная недоработка.
Во время проведения предварительных наземных испытаний специалисты ОКБ В.Н. Челомея не обратили внимания на одно, казалось бы, простое действие в процессе разделения аппарата-перехватчика и ракеты-носителя. Запроектированное разделение состояло из нескольких последовательных операций.
Первая операция. После окончания работы двигателей второй ступени ракеты-носителя, разрываются пироболты, крепящие КА-перехватчик к проставке, и происходит освобождение перехватчика от ракеты-носителя.
Вторая операция. Срабатывают тормозные пороховые двигатели, установленные на второй ступени ракеты, носитель тормозится, и космический аппарат выходит из проставки. Начинается разделение.
Третья операция. Отрывается жгут электропроводов с платой разъемов.
Четвертая операция. При выходе космического аппарата из проставки выдергивается «чека», укрепленная на металлическом тросике, который намотан на барабане, установленном в проставке. При выдергивании «чеки» бортовая батарея космического аппарата подключается к электросети и начинается раскрытие выдвижных устройств, боевой части, выдвижение антенн. С этого момента начинает функционировать бортовая аппаратура управления космического аппарата.
Недоработка заключалась в следующем. При отрыве плата электроразъемов, как правило, ударяла по тросику и «чека» выдергивалась преждевременно, до выхода космического аппарата из проставки. Начиналось преждевременное раскрытие его антенн и боевой части. Антенны выдерживали, но выдвижение боевой части нарушалось. В боевое положение она приводилась пружинами пантографа Эванса. При ударе о проставку напряжение пружин пантографа уменьшалось, и они уже не могли дотянуть боевую часть до рабочего положения. Две половинки боевой части оставались в полувыдвинутом состоянии.
После подрыва зарядов полувыдвинутой боевой части осколки основного потока разлетались под углом 40–60 градусов к вектору скорости. Поражение мишени в этом случае могло быть лишь случайным, и зависело от величины и направления вектора промаха. Так и случилось при пусках «Космос-397» и «Космос-404». Почти два года специалисты ОКБ-52 хранили в секрете разгадку этого явления, хотя на всех следующих аппаратах они устанавливали ловушку для отрывной платы электроразъемов».
Дополнительный этап совместных испытаний с заказчиком проводился по решению ВПК с августа 1969 по декабрь 1971 года. Средства комплекса отрабатывались для оценки возможности принятия в эксплуатацию. На этом этапе проведено восемь пусков космических аппаратов с помощью штатных ракет-носителей. Из них — шесть пусков аппаратов «ИС» и два пуска мишеней И-2М и 11Ф631".
Источник: Щит России: системы противоракетной обороны. — М.: Издательство МГТУ им. Н.Э. Баумана, 2009.
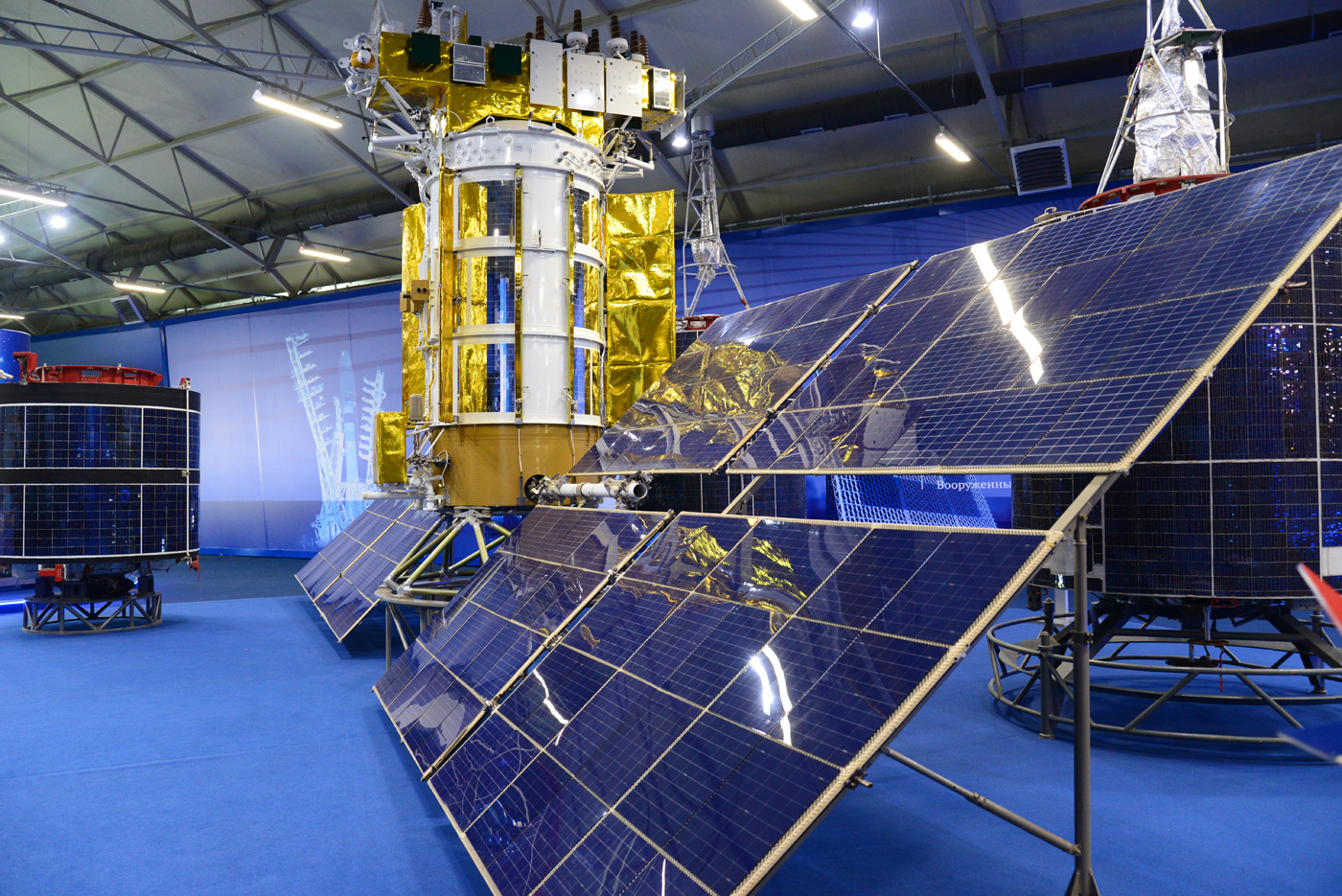
Телекоммуникационный спутник-ретранслятор «Луч», 11Ф669

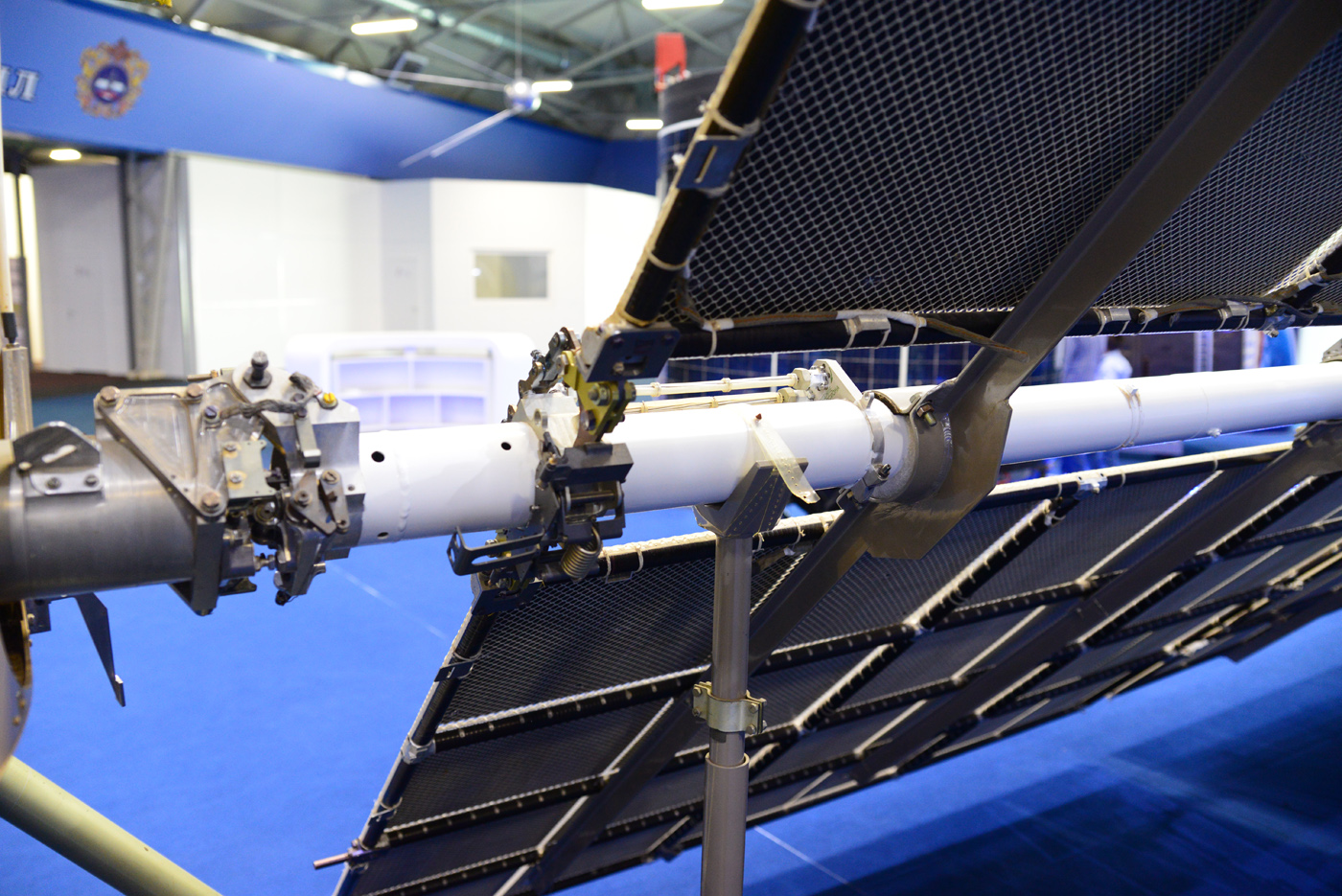
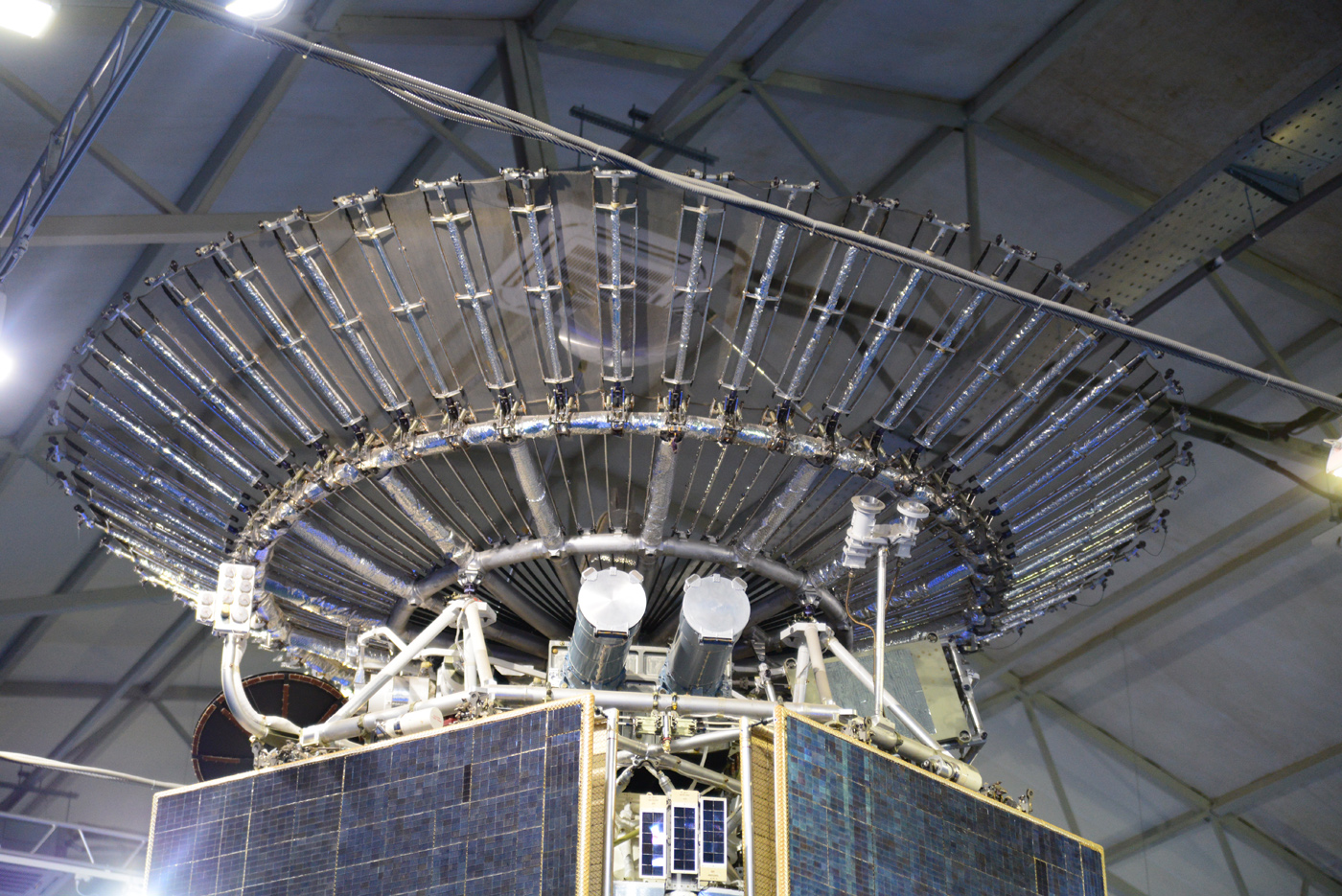
Панели солнечной батареи и антенны спутника-ретранслятора развёрнуты в рабочее положение. В земных условиях их поддерживают специальные стойки

Площадь панелей солнечной батареи спутников на платформе КАУР-4 составляет 40 квадратных метров
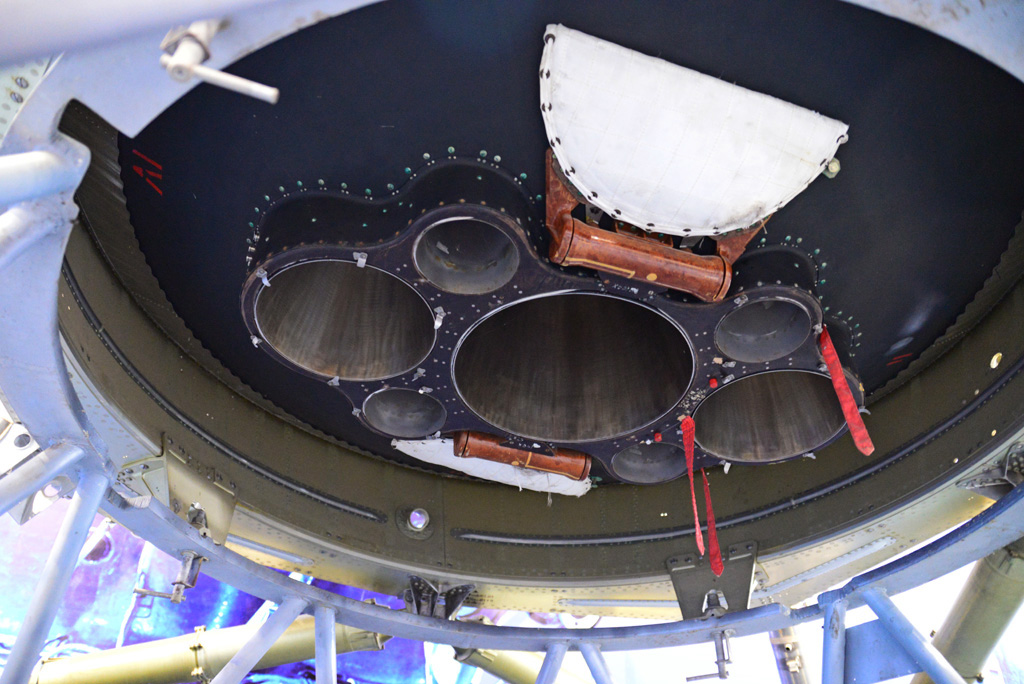
На снимке видны сопла двигателей системы ориентации спутника-ретранслятора

В верхней части космического аппарата видны крупногабаритные трансформируемые антенные системы, узкие диаграммы направленности которых потребовали повышения точности ориентации
Перед нами телекоммуникационный спутник-ретранслятор «Луч». Опираясь на материалы статьи "Спутникостроители с берегов Енисея" опубликованной в журнале «Новости космонавтики» №10 за 1999 год, расскажу об истории экспоната. В 1970-ых годах инженерами НПО Прикладной Механики были обобщены сведения о переходивших из образца в образец конструктивных элементах и подсистемах. Таким образом сформировалась концепция «унифицированных рядов космических аппаратов». В 1976 году в НПО Прикладной Механики приступили к разработке четвёртой унифицированной спутниковой платформы (КАУР – Космический Аппарат Унифицированного Ряда). Особенностями КАУР-4 являлись:
- Бортовой комплекс управления на базе бортового компьютера (105000 операций в секунду и ПЗУ на 100 Кб).
- Четыре стационарных плазменных двигателя коррекции СПД-70 (позволяли удерживать отклонения от заданного положения на геостационарной орбите в пределах 0,2 градуса по долготе).
- Трёхосная система ориентации, использующая гиростабилизаторы и электрореактивные (термокаталитические гидразиновые) двигатели ориентации, которые обеспечивали точность пространственного положения аппарата 0,1 градуса. Для сравнения: КАУР-3 обеспечивала точностью до 0,25 градуса.
- По сравнению с предыдущей платформой (КАУР-3) площадь солнечных батарей увеличена с 25 до 40 кв.метров. Кроме того, они получили одностепенные приводы наведения на солнце.
Первым применением платформы КАУР-4 стали спутники-ретрансляторы глобальной космической командно-ретрансляционной системы: 11Ф663 «Поток» (система «Гейзер», гражданское название «Сокол») и 11Ф669 «Луч» (система «Альтаир»).

Система «Гейзер» предназначалась для ретрансляции в реальном масштабе времени больших объёмов цифровой информации с низкоорбитальных спутников оптико-электронной разведки («Янтарь-4КС1», позднее «Целина-2») на наземный пункт приёма. Запуск первого «Потока» состоялся 18 мая 1982 года. Всего было запущено 10 таких аппаратов.



Система «Альтаир» тоже использовалась в военных целях. Ретрансляторы «Луч» обеспечивали двустороннюю широкополосной связь с подвижными объектами: кораблями ВМФ, космическими аппаратами и орбитальными станциями, а также передачи телеметрической информации с разгонных блоков и верхних ступеней ракет-носителей. Например, система "Альтаир" позволила ликвидировать длительные перебои связи орбитального комплекса «Мир» с Землей. Теперь ЦУП видел станцию даже на противоположной стороне планеты.
Телекоммуникационный спутник-ретранслятор «Луч»


Спутники-ретрансляторы предназначались для передачи больших объёмов оцифрованных изображений земной поверхности получаемых со спутников оперативной видовой разведки. Поэтому ретрансляторы «Луч» оснастили бортовыми антеннами большого размера. Узкая диаграмма направленности потребовало повышение точности ориентации орбитальной платформы до 0,1 градуса. Наведение антенн спутника-ретранслятора «Луч» производилось по радиолучу станции-адресата. Коррекция по долготе выполнялась с помощью стационарных плазменных двигателей СПД-70.
Телекоммуникационный спутник-ретранслятор «Луч»

Запуск первого «Альтаир 11Л» (под открытым названием «Космос-1700») состоялся 25 октября 1985 года. Всего было запущено 4 ретранслятора этого типа. Запуск последнего аппарата – «Альтаир 15Л» («Луч-15») в 2000 году не состоялся. Спутник передали в Санкт-Петербургский музей связи им. А. С. Попова. Насколько я понимаю, как раз он и демонстрируется в парке «Патриот».

Телекоммуникационный спутник-ретранслятор «Луч»


Телекоммуникационный спутник-ретранслятор «Луч-2»
В процессе испытаний первого поколения ретрансляторов «Луч» выяснилось, что их транспондеры имеют большой запас по энергетике и не используются на 100%. Поэтому модернизированный «Альтаир» («Луч-2», кодовое название «Гелиос») получил двойное назначение. Помимо военных задач, спутник использовался для сбора и передачи телевизионной информации, ТВ-обмена между телецентрами, проведения репортажей, организации связи в чрезвычайных условиях и в труднодоступных районах.
Одна из бортовых антенн спутника «Луч-2»
Телекоммуникационный спутник-ретранслятор «Луч-2»
Во время выведения на орбиту панели солнечной батареи находятся в сложенном положении
Телекоммуникационный спутник-ретранслятор «Луч-2»



Телекоммуникационный спутник-ретранслятор «Луч-2»

Надпись "Модуль М70. 17Б11.Сб.1325. Заводской №76912304"
Маркировка: 11Ф663 1410. №79489305. Странно, ведь 11Ф663 - это код спутников «Поток» (система «Гейзер», гражданское название «Сокол»). «Поток» и «Луч-2» роднит только общая платформа КАУР-4.

Спутник связи «Радуга-1М», 17Ф15М
Военный спутник связи третьего поколения «Радуга-1М» (17Ф15М, кодовое название «Глобус-1М») предназначен для ретрансляции сигналов связи. Современная многоствольная ретрансляционная аппаратура (сантиметровый и дециметровый диапазоны волн) позволяет устанавливать надежную связь с подвижными станциями, включая труднодоступные горные районы. Производится этот космический аппарат АО «Информационные спутниковые системы» имени академика М.Ф. Решетнёва» в городе Железногорск.

Военный спутник связи «Радуга-1М»

Военный спутник связи «Радуга-1М»



Спутник связи «Стрела-1М», 11Ф625
Судя старым фотоснимкам аппарат «Стрела-1М» с номером 8009152506 раньше находилась в академии Можайского. Вероятно оттуда его передали в парк «Патриот».
См. также: Спутник связи 11Ф625 «Стрела-1М» (на музейной табличке указан шифр ОКР – «Светоч») в ЦМВС, г.Москва

Спутник связи «Стрела-2М», 11Ф626
11Ф626 «Стрела-2М», шифр ОКР «Форпост» – аппарат из серии низкоорбитальных спутников связи, разработанных и производимых НПО Прикладной Механики.
Источником информации по этому изделию мне послужила статья В. Кириллова и П. Михеева, "Расстояния на миг сократив" опубликованная в журнале «Теле-Спутник» №7 за 1997 год. Далее я приведу пространную цитату из этой публикации.
"Первые аппараты для низкоорбитальных систем связи были разработаны в днепропетровском КБ "Южное" (ЩКБ-583) во главе с Главным конструктором М.К.Янгелем. Однако из-за сильной загруженности этого предприятия в 1963 году разработка низкоорбитальных спутников связи была передана оттуда в красноярское НПО Прикладной механики, возглавляемое М.Ф. Решетневым. Позже к этим работам в СССР подключилось омское ПО "Полет". Такие аппараты первого поколения низкоорбитальных спутниковых систем работали по принципу "почтового ящика". Переданное сообщение записывалось на аппарате и передавалось через некоторое время, требуемое для прихода спутника в зону радиовидимости пункта приема."
Первыми заказчиками низкоорбитальных спутниковых систем в СССР стали Комитет Госбезопасности и Главное разведуправление Генерального Штаба Вооруженных Сил. Системы связи на низких орбитах, использовавшиеся для передачи информации из-за рубежа, вполне удовлетворяли эти ведомства. Во-первых, такие системы не требовали громоздкого радиопередающего оборудования. Во-вторых, они обладали большой живучестью. Выход из строя одного – двух аппаратов практически никак не сказывался на общем состоянии "роя". Требования к оперативности доставки информации не были очень велики – режим "почтового ящика" вполне устраивал заказчиков.

Собственно спутник скрыт солнечной батарей кольцевого типа

Основными пользователя системы «Стрела» были КГБ и ГРУ Генштаба ВС СССР, которые передавали по спутниковым каналам шифрограммы и оцифрованные изображения

"Экспериментальные запуски первых советских низкоорбитальных спутников "Стрела-1" начались в 1964 году. После проведения испытаний такие спутники стали запускаться регулярно по 8 штук за один пуск на ракетах-носителях "Космос-3", а позже – "Космос-3М". Причем спутники не выводились в какое-то конкретное место орбиты. Носитель обеспечивал лишь размещение восьмерки аппаратов в определенной орбитальной плоскости. Расхождение же "Стрел" по этой орбите обеспечивалось разными временами отделения от ракеты. Тем самым орбиты каждого из восьми "Стрел-1" получались разными, и аппараты постепенно "разбегались".
Более крупный аппарат "Стрела-2" впервые был выведен на орбиту год спустя – в 1965 году. Он был тяжелее "Стрелы-1", из-за чего эти спутники запускали только по одному аппарату за пуск – на тех же ракетах-носителях "Космос-3" и "Космос-3М". Однако "Стрела-2" имел при этом и более высокую информативную пропускную способность, чем его предшественник. С конца 60-х годов запуски обоих вариантов "Стрел" стали проводиться в СССР регулярно с целью создания орбитальных группировок и перехода от экспериментальной к штатной эксплуатации систем низкоорбитальной связи. Впоследствие эти аппараты прошли модернизацию, на них изменилась элементная база. "Стрела-1М" и "Стрела-2М" запускались вплоть до начала 90-х годов".
Спутник связи «Гонец-Д1»
Обратите внимание на поразительное сходство статьи в Википедии и таблички у космического аппарата «Селена». Цитата: "«...» — российская многофункциональная система персональной спутниковой связи (МСПСС), построенная на базе низкоорбитальных космических аппаратов. Назначением системы является оказание услуг связи в глобальном масштабе." Претензий к такому сходству быть не может, да вот только в Википедии вместо многоточия — слово «Гонец», а на табличке — слово «Селена». С какой целью эта замена произведена – не знаю. Важно иное: на снимке скорее всего «Гонец-Д1», конверсионный вариант спутника спецсвязи 17Ф13 «Стрела-3».


Коническая спиральная антенна

Вновь обратимся к обзору низкоорбитальных спутниковых систем связи, т.е. к статье В. Кириллова и П. Михеева, "Расстояния на миг сократив" опубликованная в журнале «Теле-Спутник» №7 за 1997 год. Цитата:
"С 1985 года началось развертывание более современной системы спутниковой связи на низких орбитах – «Гонец», использовавшей более современный спутник «Стрела-3». Запуски по шесть аппаратов за раз осуществлялись с помощью более мощной ракеты-носителя «Циклон-3». Сперва пуски проводились опять же в интересах Министерства обороны. Однако 13 июня 1992 года боевые расчеты Военно-космических сил России осуществили запуск двух демонстрационных аппаратов «Гонец-Д» (их официально нарекли «Космос-2201» и «Космос-2202») для отработки гражданской системы космической связи на базе военных спутников. Демонстрация увенчалась успехом, а потому с 19 февраля 1996 года началось развертывание первого этапа системы «Гонец»: на орбиту вышли три спутника – «Гонец-Д1-1», «Гонец-Д1-2» и «Гонец-Д1-3».

Спутник связи «Гонец-Д1»
14 февраля 1997 года боевые расчеты Военно-космических сил России провели с космодрома Плесецк запуск еще одной тройки спутников «Гонец-Д1». Первоначально для развертывания первого этапа системы предполагался запуск двух комплектов из 6 спутников «Гонец-Д1». Однако впоследствии Российское космическое агентство и Генеральный Штаб Вооруженных сил РФ договорились об осуществлении Военно-космическими силами четырех запусков со смешанной нагрузкой вместо двух раздельных. Такой подход позволил в более короткий срок получить рабочую группировку с аппаратами в двух орбитальных плоскостях, что улучшает режим связи по сравнению с нахождением этих же спутников в одной плоскости.
Система космической связи «Гонец-Д1» предназначена для передачи информации в режиме электронной почты. Спутники системы выводятся вместе с аппаратами «Стрела-3» военной системы связи. Различаются они лишь, по-видимому, рабочими частотами. Головными разработчиками системы «Гонец» являются НИИ Точных приборов (г.Москва) и НПО Прикладной механики (г.Железногорск Красноярского края)".
Спутник связи «Гонец-М»

Спутник связи «Гонец-М»


Спутник связи «Гонец-М»

Узконаправленная коническая спиральная антенна




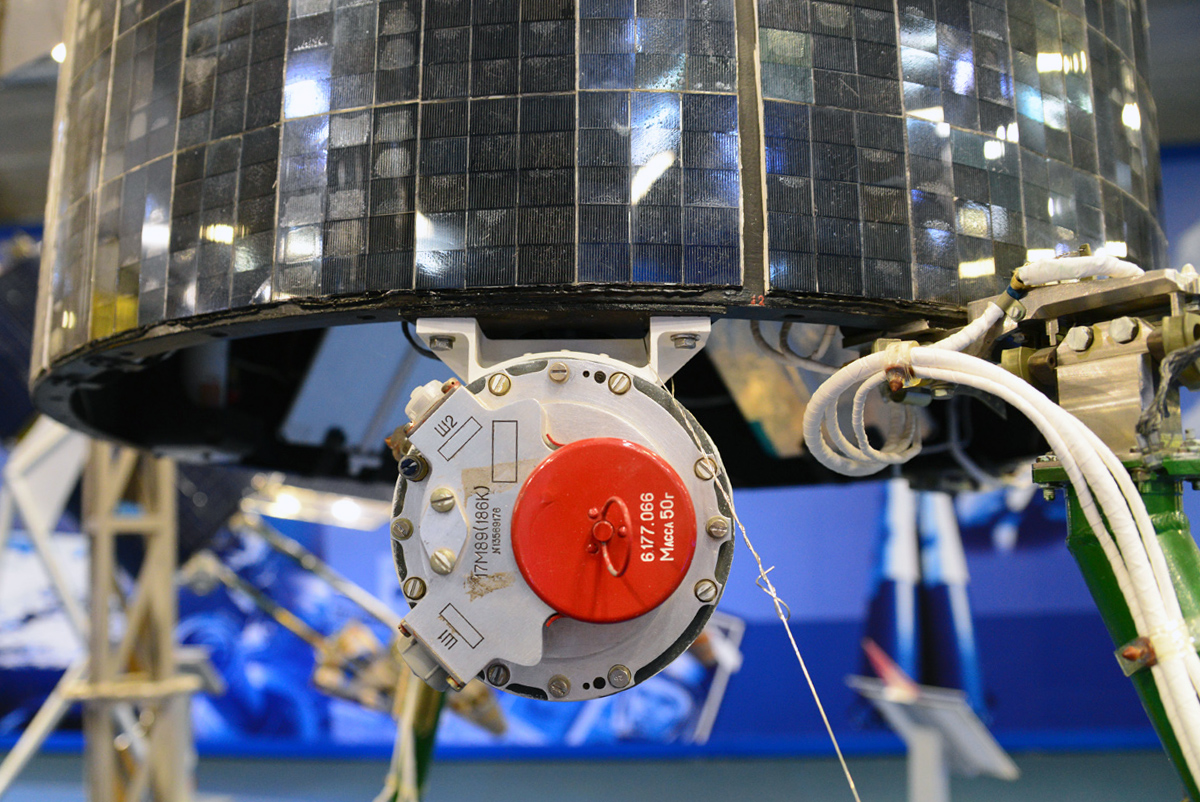
Навигационный спутник «Парус», 11Ф627
Спутники «Парус» входили в состав боевой космической навигационно-связной системы «Циклон». Предназначена она для обеспечения навигации и двусторонней радиосвязи с активной ретрансляцией через спутники сообщений с подводных лодок и надводных кораблей, находящихся в любом районе Мирового океана. Вариант этой навигационной системы для нужд гражданского флота, получил название «Цикада». Нетрудно догадаться, что первое поколение спутниковых навигационных систем сменили хорошо известные отечественная ГЛОНАСС и американская NAVSTAR GPS.
В 1957 году учёные из России (группа под руководством В.Котельникова) и Америки (учёные из Массачусетского технологического института во главе с Ричардом Кершнером) практически одновременно экспериментально подтвердили возможность определения параметров движения ИСЗ по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником, и известному положению приемника. И наоборот – определять положение приемника при известных координатах и скорости спутника.
Таким образом, родилась идея спутниковой навигационной системы. Создание такой системы не только упрощало навигацию, но и резко повышало эффективность ракетного оружия. Точность определения местоположения во время пуска баллистических ракет, находящихся на борту подводных лодок, напрямую определяла точность стрельбы ими. Открывшуюся возможность первыми реализовали в ВМФ США. По заказу моряков в 1958 году началась разработка первой спутниковой навигационной системы Transit (NAVSAT или NNSS (Navy Navigation Satellite System). Её главным пользователем стали ПЛАРБ типа «Джордж Вашингтон», вооружённые ракетами «Поларис». В 1964 году систему приняли на вооружение, а ещё через три года начали её коммерческое использование.
В 1964 году в СССР началась разработка отечественной спутниковой навигационной системы. В конце 1967 года под открытым именем «Космос-192» был запущен первый «Парус». Вот так и началось строительство первой отечественной спутниковой навигационной системы «Циклон». В 1976 году «Циклон» с подсистемой космических аппаратов из шести спутников «Парус» в шести орбитальных плоскостях, отстоящих друг от друга на 30 градусов, приняли на вооружение. Показатели точности примерно соответствовали американской системе Transit. В том же годе советскую орбитальную группировку дополнили ещё 4 аппарата, образующие гражданскую систему «Цикада». Военные потребители использовали все 10 спутников. К распаду СССР успели запустить 99 аппаратов системы «Циклон» и 22 системы «Цикада».
Источник: История спутниковой навигации. Взгляд из ОКБ-10 / КБ ПМ / НИИ ПМ / ИСС имени академика М.Ф. Решетнёва

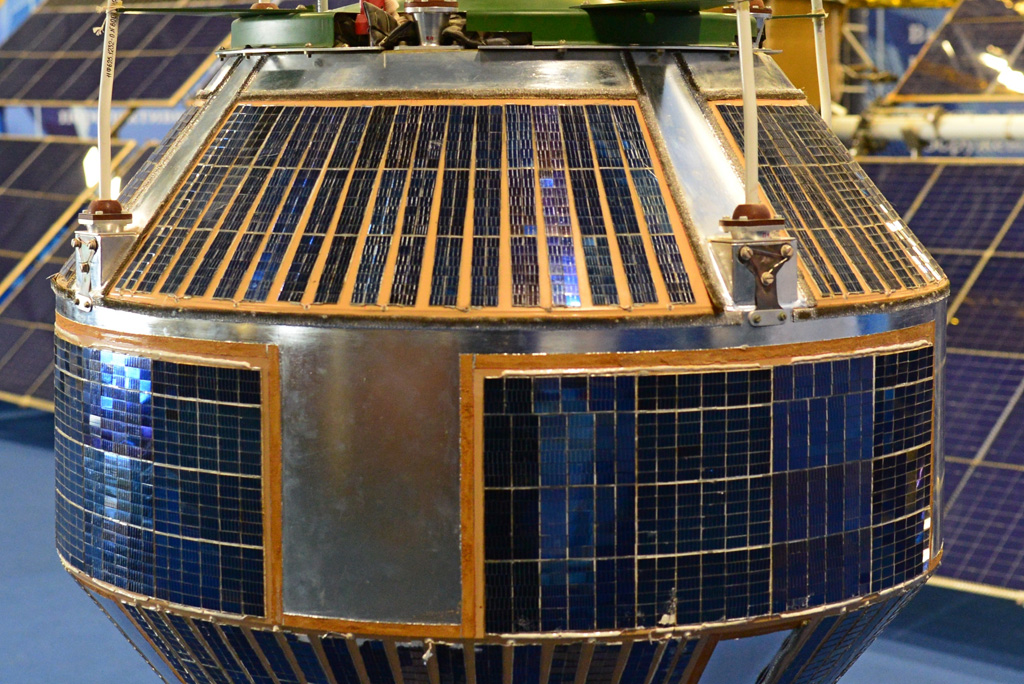
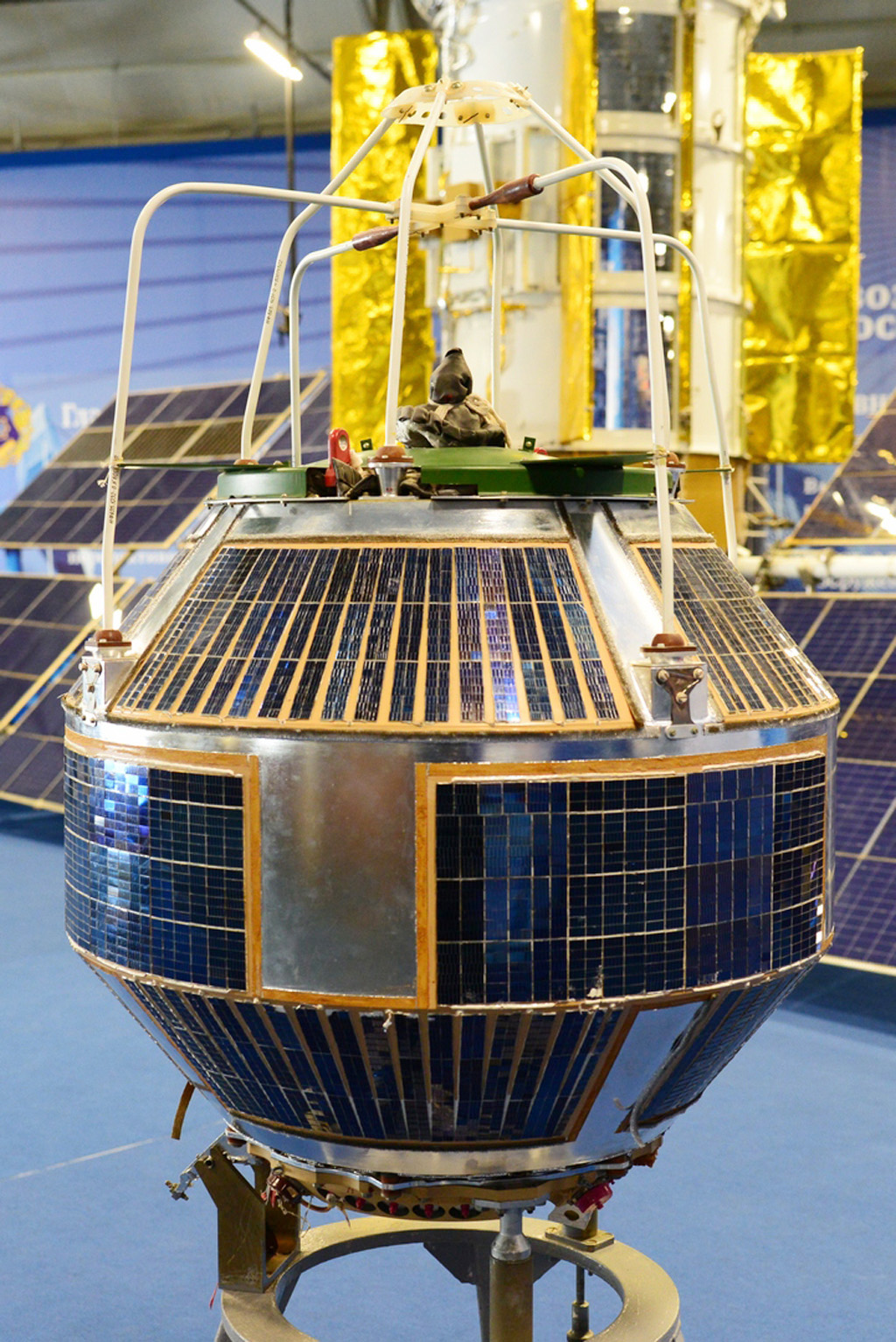
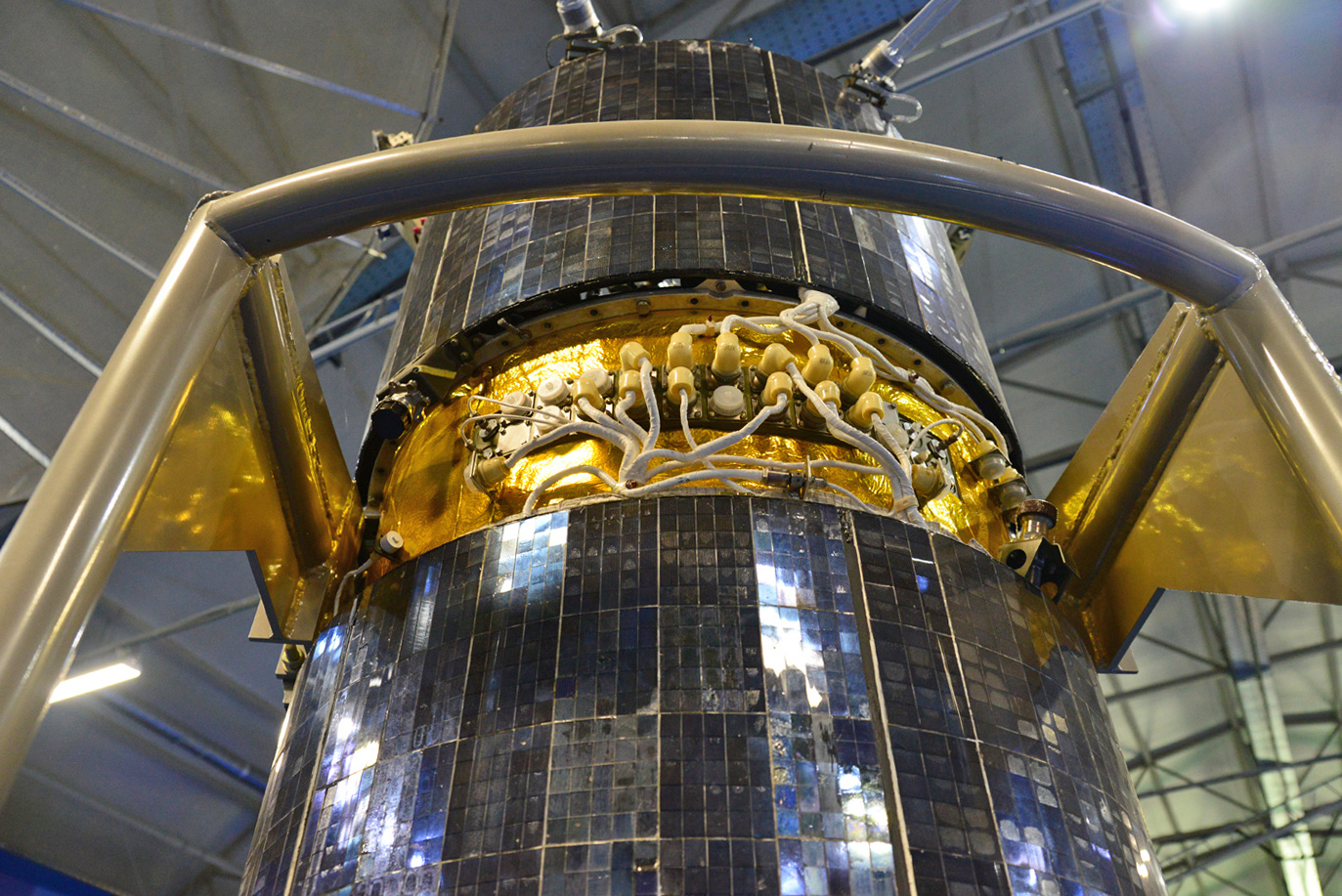
Навигационный спутник 11Ф627 «Парус» навигационно-связной системы «Циклон-Б». Конструктивной основой аппарата служит герметичный приборный отсек цилиндрической формы. Внешний вид навигационных спутников Ф627, Ф617 и Ф643 одинаков. Они отличаются лишь антеннами, расположенными на днище корпуса.
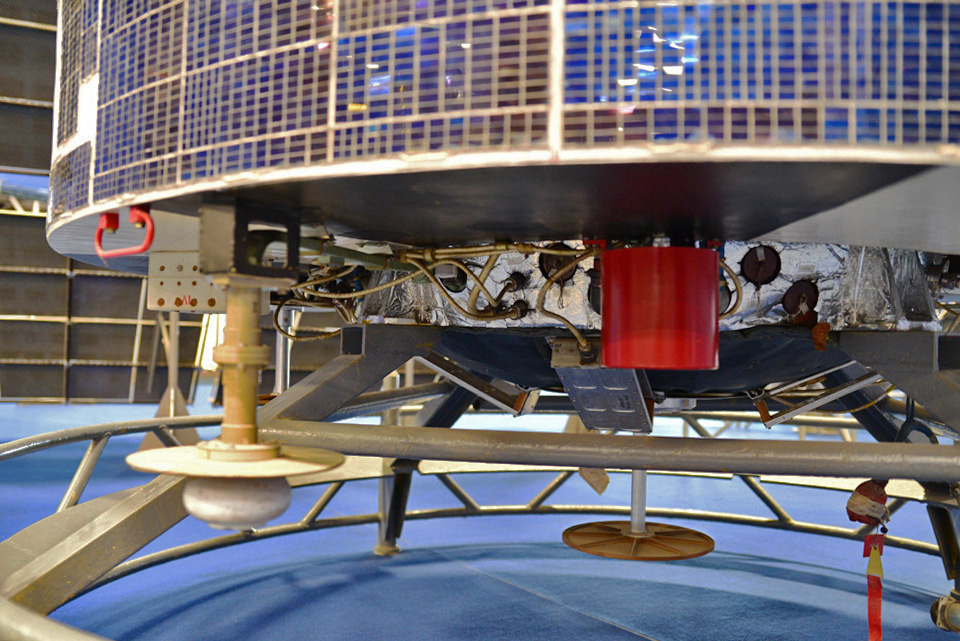
Вокруг приборного отсека установлена цилиндрическая панель солнечной батареи. Электрический ток вырабатывали только те панели, которые освещались Солнцем.
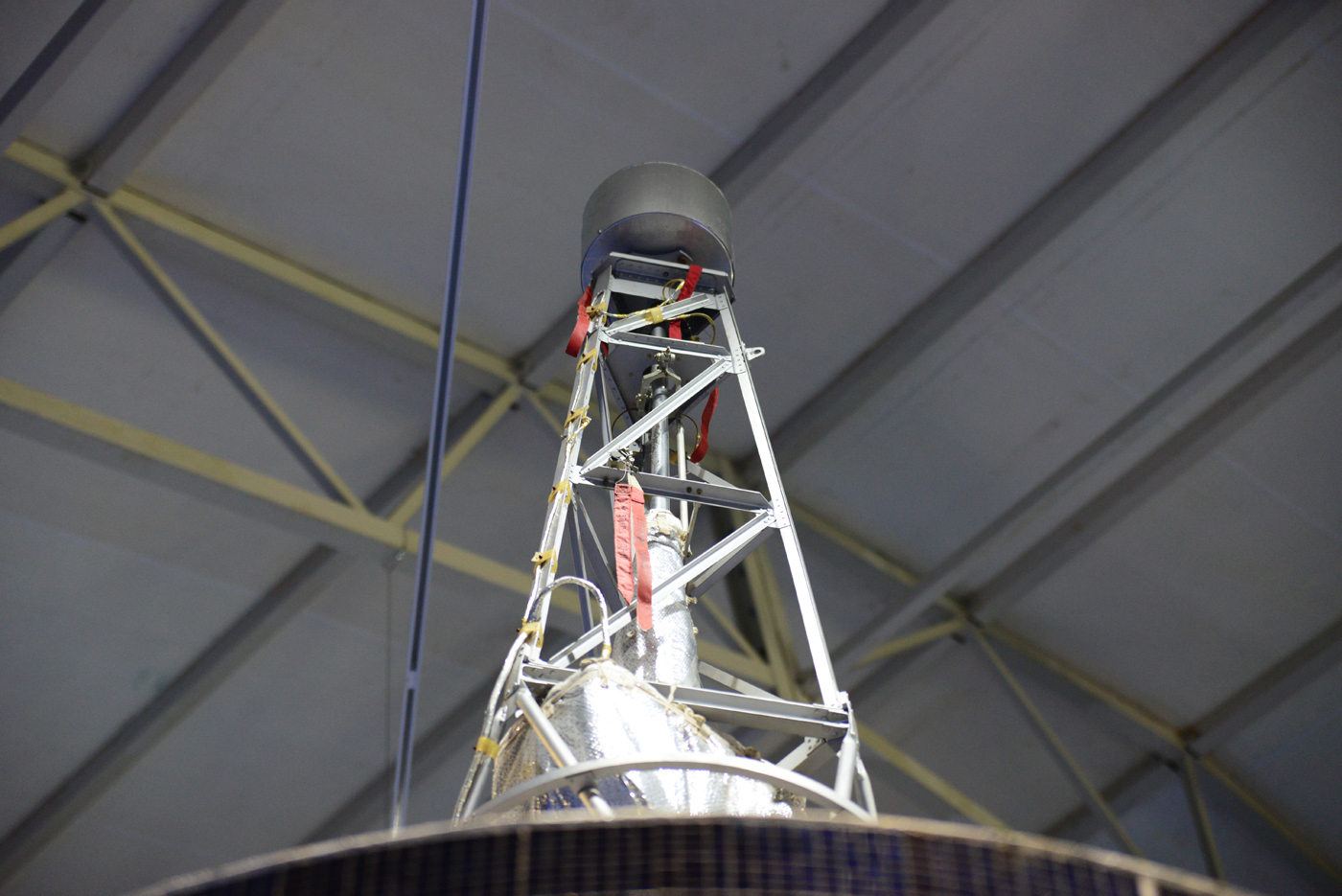
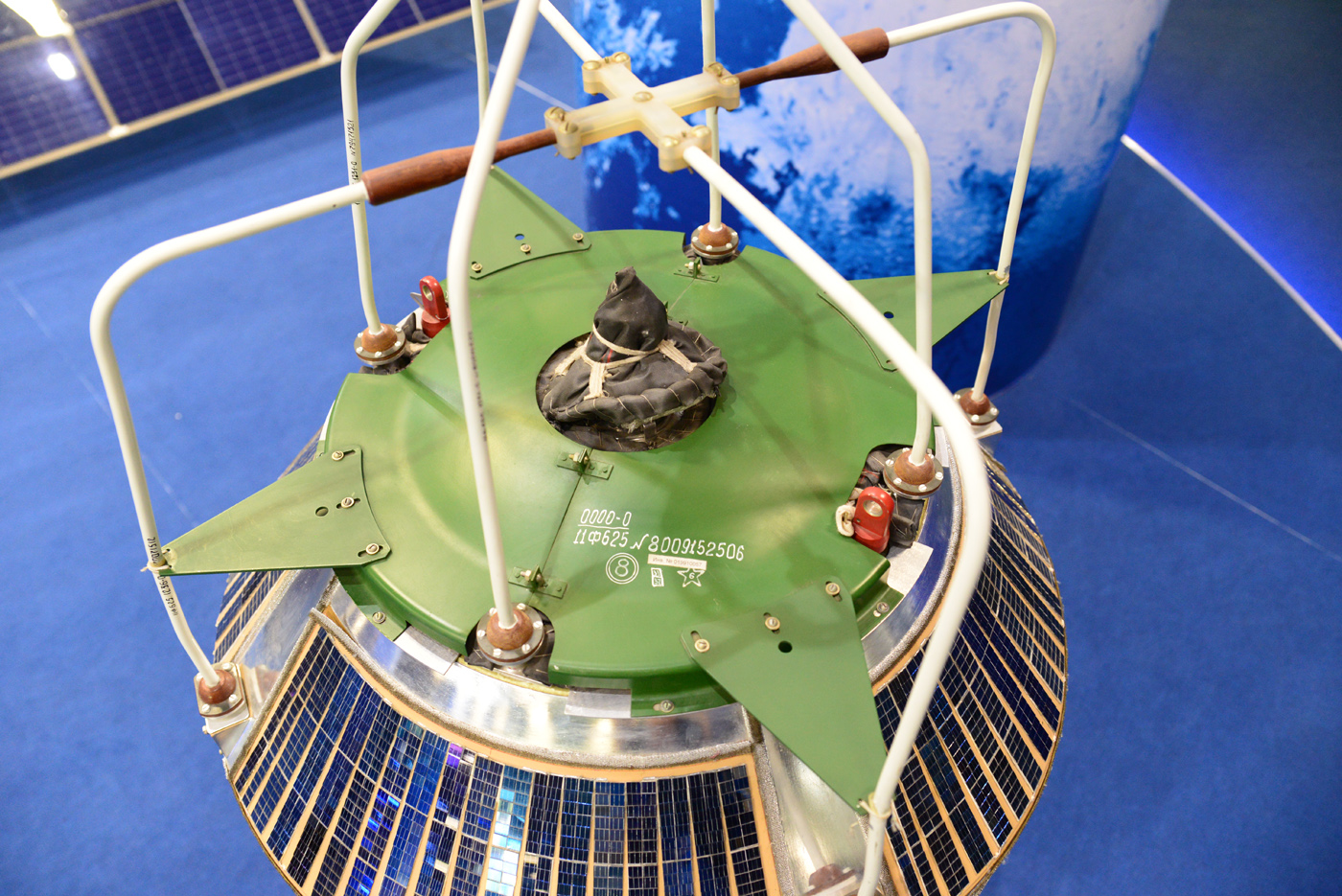
Мачта системы магнитно-гравитационной стабилизации с выдвижной штангой и укреплённым на конце массивным телом. Система магнитно-гравитационной стабилизации обеспечивает в орбитальном полете ориентацию продольной оси космического аппарата вдоль местной вертикали с точностью около 1 градуса. Аппараты стабилизируются на орбите вращением вокруг продольной оси.

На нижнем торце приборного отсека смонтированы антенны целевой аппаратуры. Все аппараты «Парус» излучают навигационные сигналы на двух частотах в диапазонах 150 и 400 МГц.
"... СРНС, ставшая затем «Циклоном», планировалась как спутниковая система радиосвязи. Эскизное проектирование её началось ещё в 1962 году в НИИ-695 (Московский научно-исследовательский институт радиосвязи) под руководством Л. И. Гусева. Разработкой и изготовлением первого навигационно-связного ИСЗ с 1963 года занималось Красноярское КБ Прикладной Механики под руководством М. Ф. Решетнёва. Для этого в КБ Решетнёва был спроектирован и изготовлен так называемый космический аппарат унифицированного ряда (КАУР), который представлял собой спутниковую платформу, на основе которой в НПО ПМ и затем в ПО «Полёт» изготавливались ИСЗ различного назначения. На базе КАУР-1 изготавливались космические аппараты экспериментальных СРНС, которые впоследствии стали СРНС «Циклон», «Циклон-Б», «Цикада» и «Надежда». Всего на базе первой версии КАУР было изготовлено более сотни ИСЗ, из которых 156 успешно выводились в космос с 1967 года до 2010 года.
Внешний кожух КАУР-1 имел цилиндрическую форму и служил для крепления на нём блоков солнечных панелей кремниевых фотопреобразователей, которые не ориентировались относительно Солнца. Такой вариант размещения солнечных панелей не приводил к эффективному использованию всей их поверхности, так как электрический ток вырабатывали только те панели, которые освещались Солнцем. Корпус ИСЗ имел следующие габаритные размеры: высота 3 м, диаметр 2,035 м. Внешний кожух служил также радиатором активной газожидкостной системы терморегулирования спутника. Внутри кожуха располагался герметичный контейнер длиной 2,06 м и диаметром 1 м с аппаратурой. Пространство между кожухом и гермоконтейнером частично использовалось для размещения аппаратуры. Спутник ориентировался в пространстве с помощью одноосной магнитно-гравитационной системой ориентации (МГСО), разработанной группой инженеров под руководством Л. А. Мирошниченко. На рис. 5.1 видна её идущая вверх штанга с укреплённым на конце массивным телом. Штанга выдвигалась после вывода спутника на заданную орбиту. Длина спутника с выдвинутой штангой системы ориентации составляла 16,5 метров. Ось ориентации спутника в пространстве проходила вдоль штанги. Магнитно-гравитационная система ориентации позволяла отказаться от дополнительных микродвигателей. Благодаря этой системе, передающие и принимающие остронаправленные антенны ИСЗ всегда были обращены в сторону центра Земли с точностью ±10°"
Источник: Комаровский Ю.А., "Первые спутниковые навигационные системы"
"Работы по созданию первой навигационно-связной системы «Циклон» для Военно-морского флота СССР велись в первой половине 60-х годов. Создание такой системы должно было ликвидировать разрыв между потенциальными боевыми возможностями появившихся в конце 1950-х — начале 1960-х годов ракетных подводных лодок и характеристиками автономных средств управления их движением и подготовки данных для стрельбы ракетным оружием. От точности определения местоположения лодки напрямую зависела точность стрельбы баллистическими ракетами, находящимися на борту.
Разработанное ЦУКОС МО совместно с ВМФ тактико-техническое задание предусматривало создание системы с четырьмя спутниками на низкой круговой орбите, обеспечивающей с помощью корабельной и лодочной навигационной аппаратуры обработку навигационных сигналов спутников и определение местоположения. Наличие канала служебной связи позволяло повысить оперативность управления силами флота.
В 1962 г. НИИ-695 разработал эскизный проект на экспериментальную навигационно-связную систему «Циклон» с двумя режимами работы: режим с переносом информации, который мог быть использован подводными лодками (ПЛ) и надводными кораблями при их нахождении в любом районе Мирового океана, и режим непосредственной ретрансляции, используемый при одновременном нахождении объектов ВМФ в зоне видимости КА. Высота орбиты КА была 800-1000 км.
Разработку системы «Циклон» и космических аппаратов 11Ф617 осуществляло КБ прикладной механики МОМ (г.Красноярск-26, главный конструктор — М.Ф.Решетнев), навигационного и командно-измерительного комплексов — НИИ «Радиоприбор» МОМ (главный конструктор — Н.Е.Иванов, директор — Л.И.Гусев), связного комплекса и системы в целом — МНИИРС МПСС (главный конструктор связной части системы — Н.Н.Несвит, корабельного комплекса — И.Х.Голдштейн). Спутник выводился ракетой-носителем «Космос-3М». Летные испытания были начаты в 1967 г. и проводились государственной комиссией под руководством вице-адмирала Г.Г.Толстолуцкого — начальника связи ВМФ.
Система «Циклон», как и разработанная еще в 1958 г. аналогичная американская система Transit, использовала допплеровский метод определения местоположения. Эта методика основана на том, что по изменению допплеровского сдвига частоты радиосигнала от спутника, движущегося по орбите с известными параметрами, можно рассчитать географические координаты точки наблюдения.
В состав связной подсистемы вошли наземный связной пункт, бортовая аппаратура связи КА, комплексы аппаратуры связи подводных лодок (ПЛ) «Цунами», контрольно-измерительная аппаратура.
В состав экспериментального комплекса космической связи ПЛ «Цунами» входили приемо-передающая радиостанция дециметрового диапазона «Сириус», стабилизированная направленная антенна «Сигнал», ненаправленная антенна «Конус-4», оконечная быстродействующая телеграфная аппаратура «Квант-Л», контрольно-измерительная аппаратура. Для испытаний комплексы «Цунами» были установлены в 1967 г. на подводных лодках проекта 640 Черноморского флота.
В 1967-1969 гг. были запущены первые три спутника 11Ф617 системы «Циклон» и в период до 1970 г. проведены летно-конструкторские испытания экспериментальной системы, которые позволили проверить и уточнить принципы построения аппаратурных комплексов и системы в целом.
Первые испытания на Черном море показали, что система не обеспечивает заданную точность определения местоположения. Согласно, ошибка составляла 3 км, что было абсолютно неприемлемо. Весной 1969 г. ответственность за баллистико-навигационное обеспечение навигационных КА взял на себя Центр командно-измерительных комплексов. Разрабатывавшееся в это время в ВЦ Центра КИК под руководством его начальника В.Д.Ястребова новое программно-математическое обеспечение (ПМО) позволило повысить точность расчета эфемерид навигационных КА в 10-30 раз. В ноябре 1969 г. была проведена обработка полного набора измерений одного КА в течение 5 суток на новом ПМО и достигнута точность определения местоположения 100 метров. Вскоре выяснилось, что в использовавшемся ранее ПМО были ошибки, обусловленные неаккуратным учетом аномалий гравитационного поля... Таким образом, после доработки алгоритма измерений и обработки навигационной информации удалось достичь требуемой точности.
Для накопления полноценных экспериментальных данных и подготовки предложений по созданию боевой системы спутниковой связи система «Циклон» в 1971 г. была сдана в опытную эксплуатацию под названием «Залив» (приказ министра обороны №0033 об этом вышел только в 1972 г.). При этом комплексы «Цунами-М» были дополнительно установлены на средних дизель-электрических подводных лодках проекта 613 и больших дизель-электрических лодках проекта 611, на крейсере «Адмирал Сенявин» и на плавбазе «Тобол». Таким образом, впервые среди всех видов Вооруженных Сил СССР космическая связь с помощью низколетящих спутников была использована в целях боевого управления силами ВМФ.
...
Разработка и эксплуатация систем «Циклон» и «Циклон-Б» показала необходимость расширения круга потребителей, обслуживаемых космической навигацией. Научно-исследовательские учреждения ВМФ, Министерства рыбного хозяйства, Академия наук СССР выступили с инициативой по созданию на базе системы «Циклон-Б» космической системы допплеровских навигационных КА, имеющих, в отличие от указанной системы, неограниченное время работы бортовой аппаратуры на витке и больший срок активного существования аппарата.
В соответствии с этой инициативой в 1974 г. была начата разработка космической навигационной системы «Цикада». Система создавалась для обеспечения глобальной навигацией не только ВМФ, но и судов гражданских министерств и ведомств. Разработка системы осуществлялась предприятиями Минобщемаша: КБПМ — головное по системе в целом (главный конструктор — М.Ф.Решетнев), ПО «Полет» — в части изготовления космических аппаратов (главный конструктор — А.С.Клинышков), НИИ «Радиоприбор» — в части радиотехнического комплекса и корабельной аппаратуры навигации (главный конструктор — Н.Е.Иванов).
Летные испытания системы «Цикада» начались в 1976 г. КА «Цикада» тоже выводились на орбиты высотой 1000 км с наклонением 83°, но размещались не в шести, а в четырех орбитальных плоскостях, отстоящих друг от друга на 45°. Первоначальное развертывание группировки из четырех аппаратов завершилось в 1979 г. запуском «Космоса-1092». В том же году она была принята на вооружение Советской Армией и Военно-морским флотом".
Источник: Ю.Журавин, "Новый «Парус» над планетой" («Новости космонавтики» №10/1999)
Двигательная установка системы аварийного спасения космического корабля «Союз–ТМА»
Выставочный павильон АО «Корпорация Тактическое ракетное вооружение».
В системе используются твердотопливная двигательная установка системы аварийного спасения (ДУ САС) 855М и четыре твердотопливных ракетных двигателя головного обтекателя (РДГ) 860М, разработки АО «МКБ «Искра» им. И.И. Картукова» (входит в «Корпорацию «Тактическое ракетное вооружение»), которые обеспечивают увод отделяемого головного блока (ОГБ) с космонавтами в случае аварии ракеты-носителя на начальном участке выведения космического корабля на орбиту.




"Система аварийного спасения экипажа пилотируемого корабля "Союз МС-10" сработала автоматически после аварии ракеты "Союз- ФГ", происшедшей 11 октября. Об этом сообщил в субботу журналистам заместитель главного конструктора по космической технике машиностроительного конструкторского бюро "Искра" Виктор Волчков.
"Если авария произошла на старте, как это было в 1983 году, то есть специальная команда, которая следит с Земли за работой системы спасения и включает ее. А здесь, когда все произошло в полете, сработала автоматика", - сказал он.
По словам Волчкова, в 1983 году использовалась предыдущая версия системы спасения, а в 1986 году была разработана версия шестого поколения, которая применяется до сих пор.
Он пояснил, что старт ракеты-носителя "Союз" от нулевой отметки до момента выведения на орбиту считается наиболее ответственным, рискованным и достаточно опасным. "Вся орбита поделена на несколько участков. Логика работы системы спасения - в той или иной ситуации задействовать разные алгоритмы действия. На участке, когда идет полет штатный, задачу спасения космонавтов исполняет двигательная установка системы аварийного спасения - изделие 855М", - рассказал заместитель главного конструктора.
По его словам, эта установка представляет собой комплекс двигателей.
"Он состоит из центрального двигателя, который в свою очередь двухкамерный и трехрежимный. Может работать как основная камера, так и малая, либо обе вместе. Задачу увода двигательной установки системы аварийного спасения (ДУ САС) при штатном полете выполняет двигатель разделения, верхний многосопельный. При штатном полете ДУ САС сбрасывается на 114-й секунде", - добавил Волчков.
Он уточнил, что система спасения использует четыре двигателя, которые отвечают за выдачу управляющего момента в зависимости от ветровой обстановки по четырем каналам стабилизации. "На участке после сброса ДУ САС (114-я секунда) и до момента отделения головного обтекателя задачу увода корабля с космонавтами от аварийного носителя выполняют ракетные двигатели на головном обтекателе 860М", - пояснил заместитель главного конструктора."
Источник: МКБ "Искра": система аварийного спасения экипажа "Союза МС-10" сработала автоматически - Космос - ТАСС