Космическая техника. Музей техники Вадима Задорожного
Месторасположение: Московская область, Красногорский район, п. Архангельское, 4-й километр Ильинского шоссе. Официальный сайт: http://www.tmuseum.ru
Навигация по странице:
Спускаемый аппарат космического корабля «Союз МС-05»
Шасси для планетоходов (ВНИИтрансмаш)
Технологический макет ракетного ускорителя «Байкал»
Полноразмерный макет одного из вариантов УРМ ракеты-носителя «Ангара»
Ракетный двигатель РД-219
Макет кабины орбитального корбаля «Буран»
Дополнительно:
Музей космонавтики и ракетной техники им. В.П.Глушко, Петропавловская крепость
Государственный музей истории космонавтики имени К. Э. Циолковского, Калуга
Мемориальный Музей космонавтики, Москва
Центр подготовки космонавтов им. Ю.А.Гагарина, Звёздный городок
Музей Центра подготовки космонавтов им. Ю.А.Гагарина, Звёздный городок
Национальный музей ракетно-космической техники при ФКП «НИЦ РКП», Пересвет
Мемориальный дом-музей академика С. П. Королёва, Москва
Выставка «Космические войска: через тернии к звёздам». Парк «Патриот»
Музей Ракетных Войск Стратегического Назначения, Власиха
Центр «Космонавтика и авиация» на ВДНХ, Москва
Центральный дом авиации и космонавтики, Москва
Музейно-выставочный центр «Самара Космическая»
Космическая, жд и другая спец.техника в Техническом музее, Тольятти
Спускаемый аппарат космического корабля «Союз МС-05»
"Возвращение с околоземной орбиты ТПК «Союз», а точнее, его СА, является управляемым и совершается по полубаллистической (скользящей) траектории. По сравнению с неуправляемым полётом по баллистической траектории такая схема обеспечивает б?льшую точность приземления и меньшие перегрузки.
За управление спуском СА отвечает система исполнительных органов спуска (СИОС), включающая в себя восемь реактивных двигателей. в каждой плоскости СА (крен, рыскание, тангаж) установлено по два двигателя, обеспечивающих повороты вокруг осей скоростной системы координат СА. Ещё два двигателя являются резервными и установлены в плоскости крена.
Спуск СА происходит по полубаллистической траектории с использованием аэродинамического качества. Благодаря специальной форме и центровке СА, управление подъёмной аэродинамической силой, а, соответственно, и траекторией спуска, осуществляется поворотом СА по крену. Двигатели рыскания и тангажа при этом обеспечивают стабилизацию положения СА. В случае невозможности автоматического управления спуском, например, из-за отказа двигателей тангажа или рыскания, СА придаётся угловое вращение вокруг продольной оси с помощью двигателей крена, и реализуется спуск без использования подъёмной силы — по баллистической траектории. Такая схема спуска является расчётной нештатной, и для её реализации важна безотказная работа двигателей крена. По этой причине в СИОС резервируются именно двигатели крена.
Двигатели СИОС — каталитические жидкостные ракетные двигатели малой тяги. Рабочим телом двигателей является высококонцентрированный (92,0–95,5%) пероксид водорода (вПв). Принцип работы двигателей основан на экзотермическом разложении рабочего тела на катализаторе. Продукты разложения (вода и кислород) нагреваются до температур 700–850 °С и, истекая из сопла двигателя, создают реактивную тягу. Конструктивно двигатели представляют собой цилиндрический реактор с присоединённым к нему реактивным соплом. внутри реактора расположен каталитический пакет (КП) — набор слоёв зёрен катализатора, на которых происходит разложение вПв. На входе в реактор установлен электромагнитный клапан, открывающий доступ рабочего тела в реактор.
В составе СИОС используются двигатели двух типоразмеров — с тягой 15,0 (крен) и 7,5 кгс (рыскание и тангаж)."
Источник: Кропотин С.А., Смоленцев А.А., Бобылев А.С., Перов А.А., Титов М.Ю. "Результаты повторного применения двигателей управления спуском транспортного пилотируемого корабля «Cоюз»" (журнал «Космическая техника и технологии» № 3 (34), 2021)

В нижней части по окружности спускаемого аппарата расположены шесть двигателей системы управления спуском. При возвращении корабля на Землю эти двигатели помогают удерживать спускаемый аппарат в положении, позволяющем использовать его аэродинамические качества
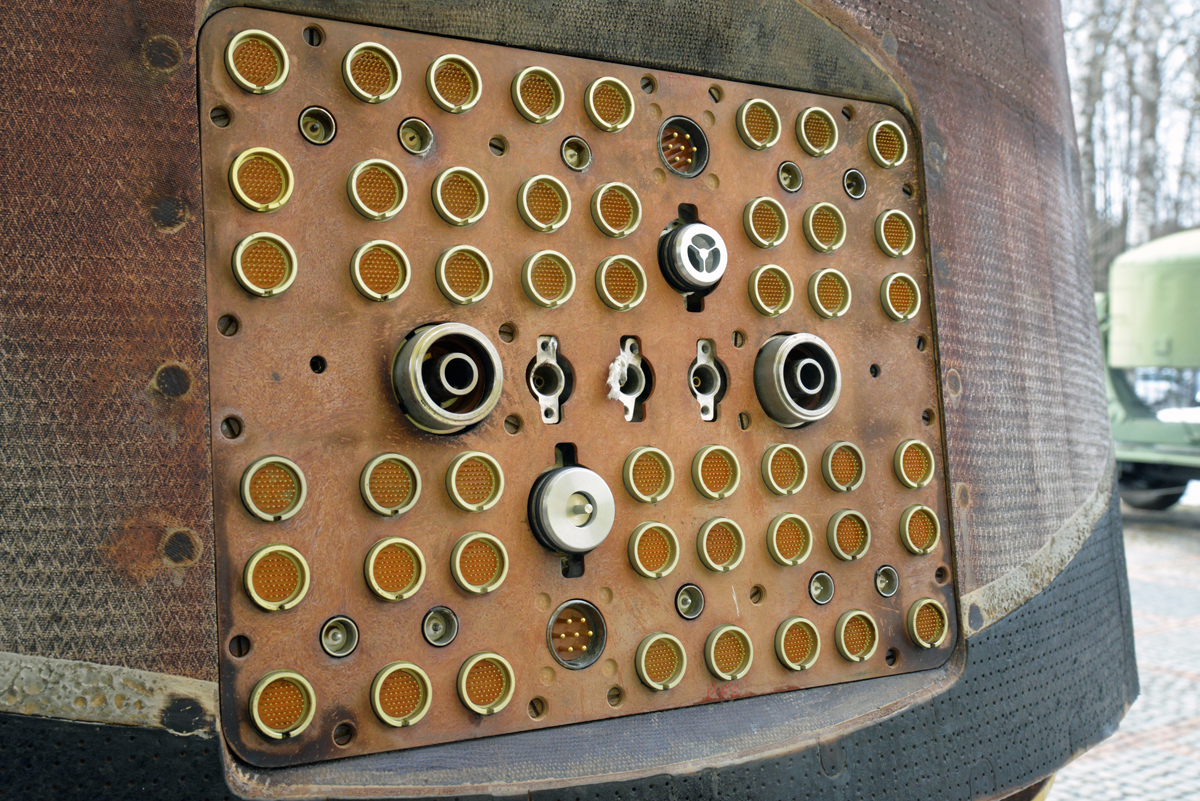
Разъёмы для стыковки кабель-мачты, соединяющей спускаемый аппарат и приборно-двигательный отсек

Иллюминатор оптического прибора (визир-ориентатор) — расположен ниже двигателей управления по тангажу.

Один из пороховых двигателей мягкой посадки


Под оргстеклом — контейнер основной парашютной системы. Справа виден аэродинамический щиток крышки контейнера запасной парашютной системы

Двигатели управления по крену системы исполнительных органов спуска (СИОС) работают на 85-процентной перекиси водорода. Верхнее сопло — резервного двигателя, нижнее — основного.

Два двигателя управления по тангажу системы исполнительных органов спуска (СИОС). Ниже — иллюминатор оптического прибора (визир-ориентатор).

Эти надписи уцелели при спуске потому что находились под теплозащитным щитом, прикрывавшим также двигатели мягкой посадки и высотомер

Для визуального обнаружения СА на участке парашютного спуска на его днище расположен светоимпульсный маяк СИБ-2А, включающийся автоматически после сброса лобового щита теплозащиты


Два двигателя управления по тангажу системы исполнительных органов спуска (СИОС)
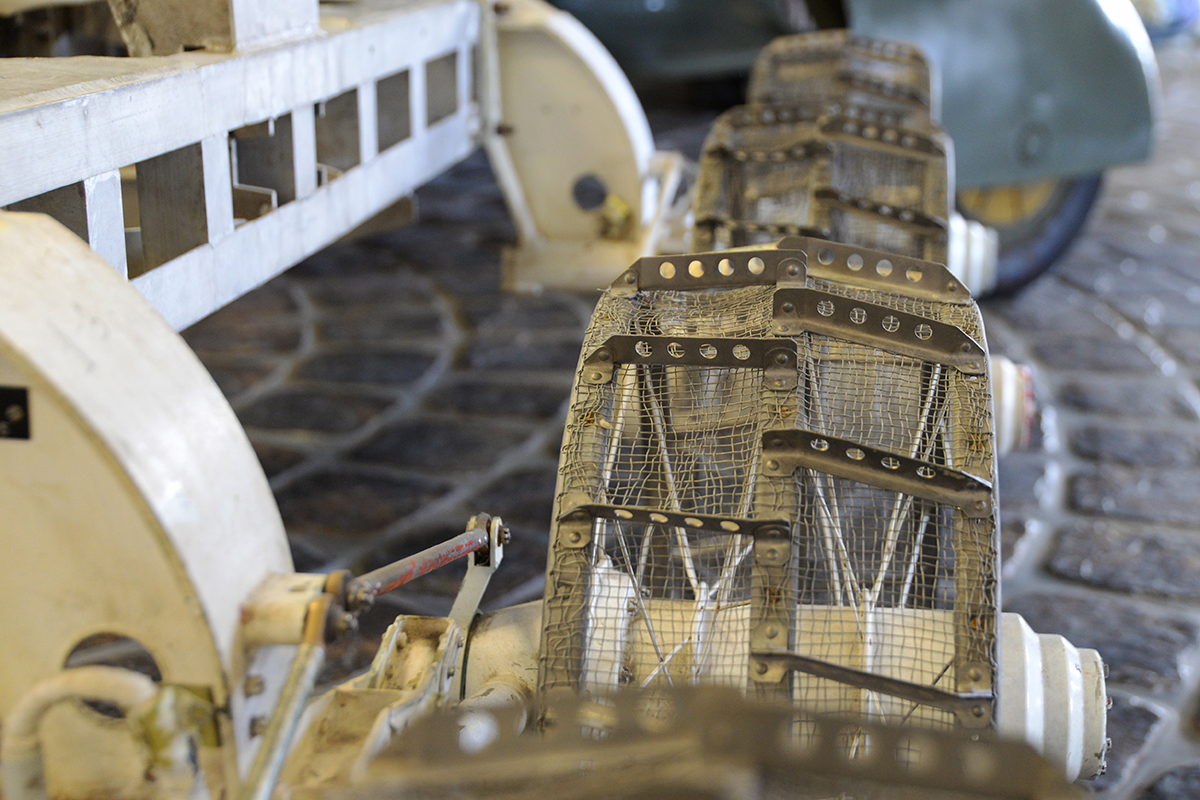
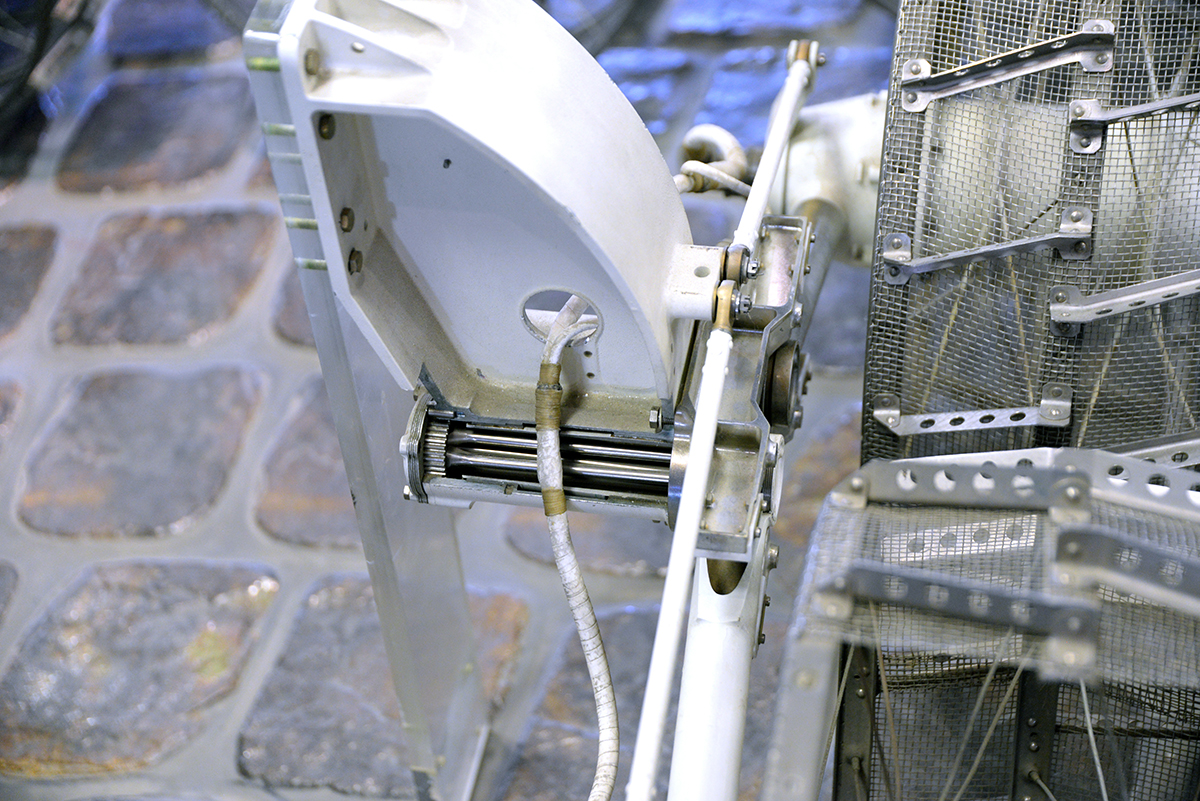
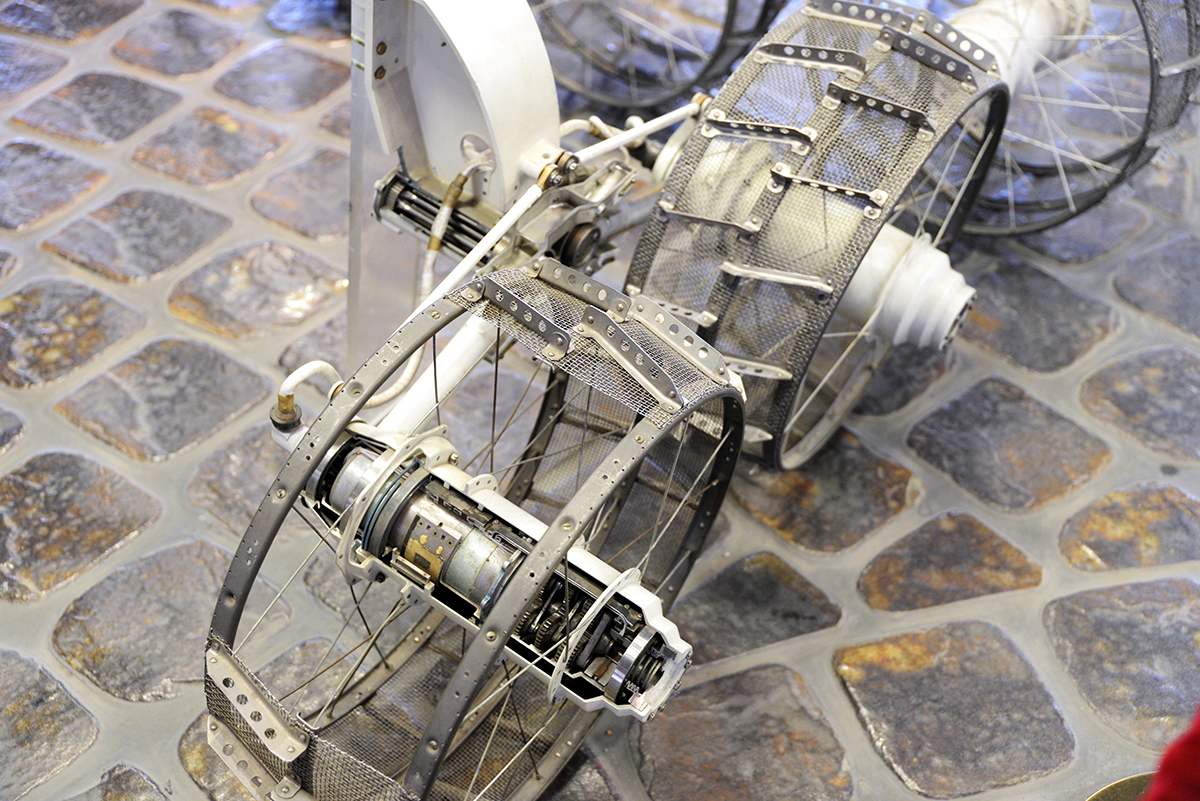
Шасси для планетоходов (ВНИИтрансмаш)
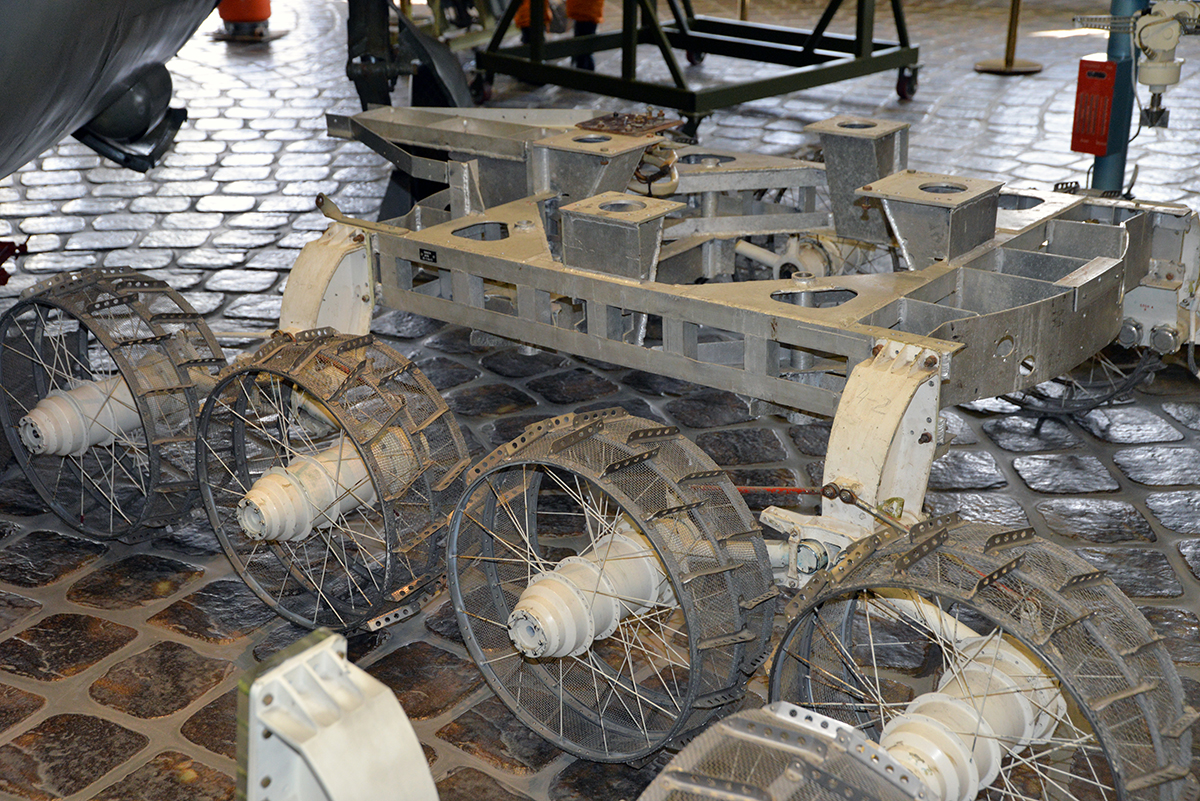


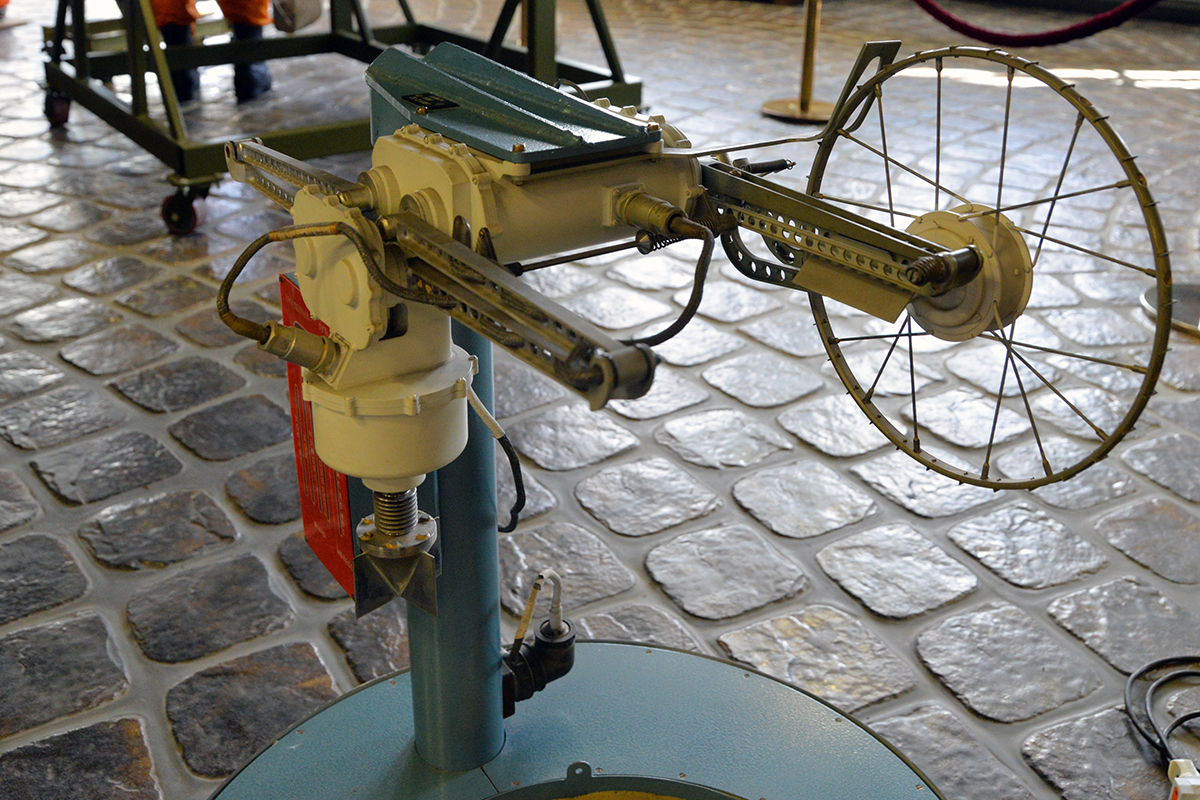
Прибор оценки проходимости поверхности и счётчика пройденного Луноходом пути
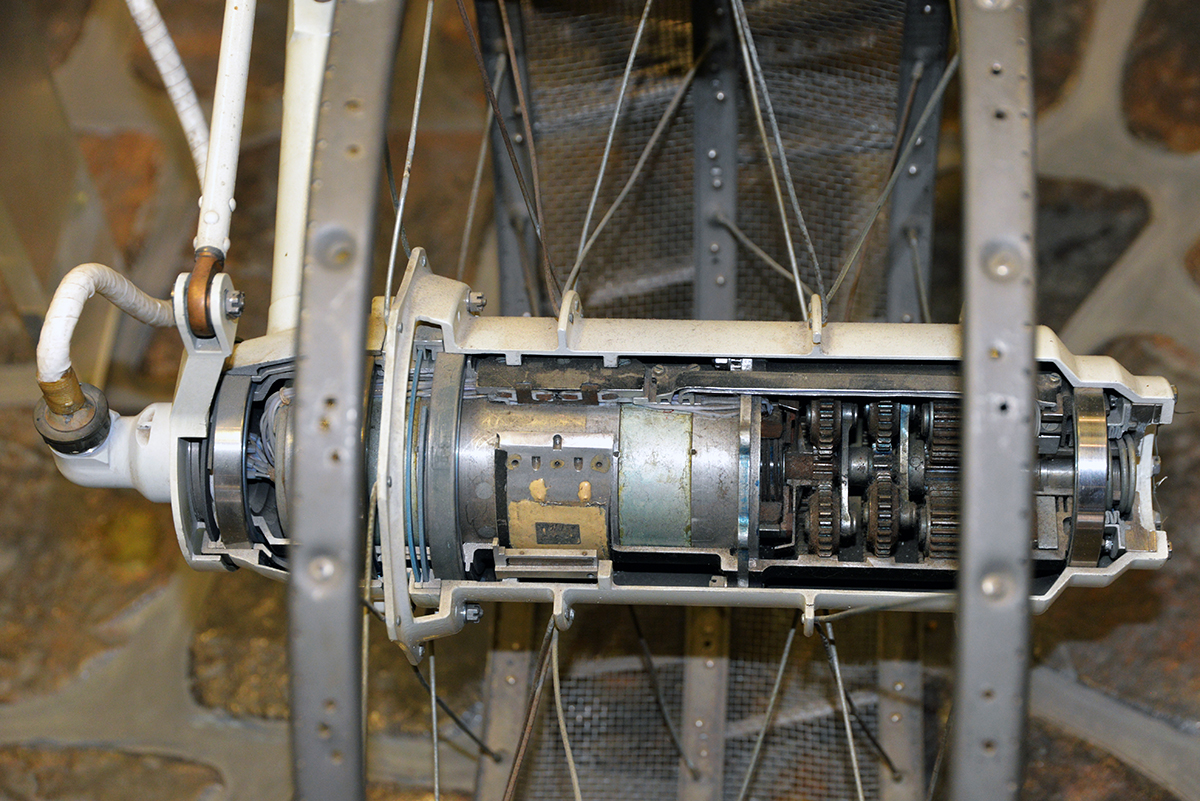
Мотор-колесо Лунохода в разрезе
Технологический макет ракетного ускорителя «Байкал»






Полноразмерный макет одного из вариантов УРМ ракеты-носителя «Ангара»












Ракетный двигатель РД-219

"Первые экспериментальные работы в рамках создания двигателей для новых боевых ракетных комплексов в ОКБ-456 главного конструктора В.П.Глушко были проведены в начале 1958 г. (Постановление СМ СССР №1003-476 вышло 28.08.1958). Компоновка общего вида двигателей, конструирование элементов общей сборки, разработка методики отработки и планирование доводочных работ проводились под руководством ведущего конструктора разработки М.Р.Гнесина.
Двигатели для ракет Р-14 и Р-16 - РД-216, РД-218 и РД-219 разрабатывались как семейство однотипных двигателей на основе базового двигательного блока РД-215: РД-216 состоял из двух РД-215 на общей силовой раме; РД-218 состоял из трех РД-217 (тот же РД-215 с измененными узлами крепления к силовой раме); РД-219 - тот же РД-215 с высотным соплом. Отработка двигателя в целом производилась только на РД-215, для РД-219 отрабатывалась только камера.
В мае 1958 г. на стенде №2 ОКБ-456 начались автономные огневые испытания экспериментальных камер на штатном топливе при баллонной подаче компонентов. Всего было проведено 41 огневое испытание 19 камер (8 «очковых» и 11 полноразмерных). По результатам испытаний были разработаны эскизный проект и конструкторская документация. Эскизный проект на двигатель РД-216 был выпущен в октябре 1958 г., а по двигателям РД-218 и РД-219 - в марте 1959 г.
Второй этап отработки камеры проходил с августа 1959 г. по февраль 1960 г. на экспериментальных сборках, состоящих из двух камер двигателя РД-216 и доработанного ТНА и агрегатов автоматики двигателя РД-214. Доводочные испытания насосов проводились в два этапа. По результатам первого этапа, длившегося с июня 1959 по январь 1960 г., обороты ТНА были снижены с 10 000 об/мин по эскизному проекту до 9500 об/мин. Отработка ТНА в целом прошла с мая по июль 1960 г.
Конструкторская документация на серию двигателей была передана заводам в середине 1959 г., стендовые испытания серийных двигателей РД-216, РД-218 и РД-219 начались в 1960 году. Серийные заводы:
- по РД-216 - №586 г.Днепропетровск и №32 г.Красноярск;
- по РД-218 и РД-219 - №586 г.Днепропетровск и №29 г.Омск.
Из-за отсутствия стендов для контрольно-технологических испытаний, серийная продукция испытывалась на стендах разработчика (ОКБ-456). При испытаниях были выявлены отдельные случаи высокочастотной неустойчивости на переходных режимах, что потребовало внесения конструктивных изменений (полностью реализованы в модификации РД-216М). В марте - мае 1960 г. на стенде НИИ-229 (Загорск) были проведены испытания двух двигателей РД-216 в составе ракет Р-14, а в августе 1960 г. — испытания двигателей РД-218 и РД-219 в составе I и II ступеней ракеты Р-16.
С 6 июня 1960 по 15 февраля 1961 г. на Государственном центральном полигоне в Капустином Яру был проведен 21 пуск ракеты Р-14 по программе ЛКИ. Для подтверждения доработок по программе УКН в сентябре -декабре 1961 г. провели восемь ЛКИ ракет Р-14 и в январе 1962 г. - трех ракет Р-14У. 24 апреля 1961 г. ракетный комплекс Р-14 (8К65) принят на вооружение.
В середине 1963 г. Межведомственная комиссия (председатель — представитель ГУРВО В.П. Ерохов) рассмотрела представленные материалы по отработке двигателей РД-216, РД-218 и РД-219 и приняла техническую документацию для их серийного изготовления и эксплуатации."
Источник: Р-14 _ Р-14У - SS-5 SKEAN _ MilitaryRussia.Ru (с помощью ABL22, http://military.tomsk.ru/forum)
Макет кабины орбитального корбаля «Буран»
